VIBRACIONES Y OSCILACIONES: DESDE EL GRADO SIMPLE HASTA LA RESPUESTA FORZADA
Paul R
Autor Principal • Engineering Vault
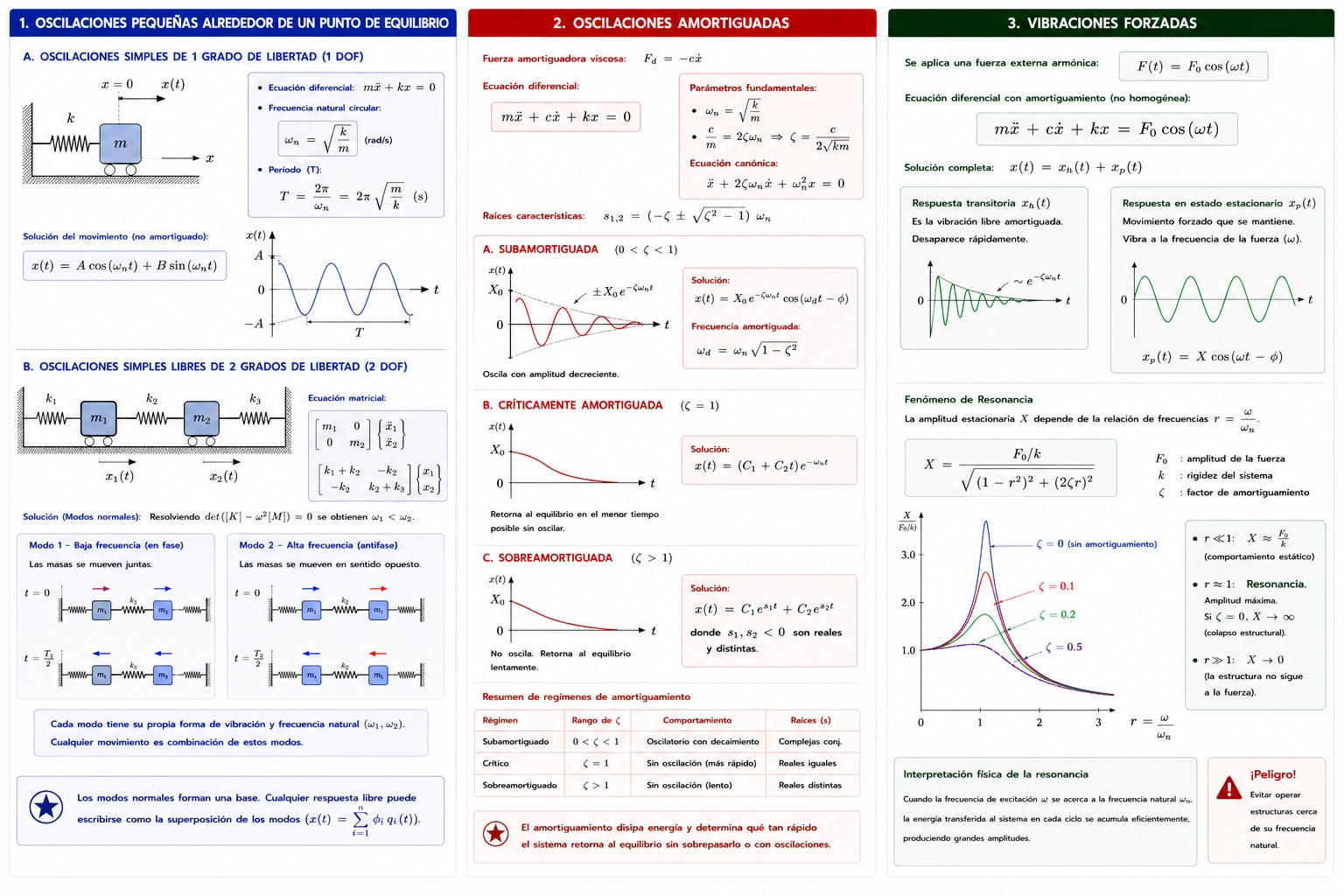
1. Oscilaciones Pequeñas Alrededor de un Punto de Equilibrio
Como vimos en el diagrama de energía, cualquier sistema conservativo que sufre una pequeña perturbación alrededor de un punto de equilibrio estable ($x_0$) se comporta como un Oscilador Armónico Simple.
A. Oscilaciones Simples de 1 Grado de Libertad (1 DOF)
- Concepto: El sistema se describe con una sola coordenada (ej. el estiramiento de un resorte o el ángulo de un péndulo simple).
- Ecuación Diferencial: $m\ddot{x} + kx = 0$
- Frecuencia Natural Circular ($\omega_n$): $\omega_n = \sqrt{\frac{k}{m}}$ (rad/s)
- Período ($T$): El tiempo que tarda en completar un ciclo: $T = \frac{2\pi}{\omega_n} = 2\pi\sqrt{\frac{m}{k}}$ (segundos).
B. Oscilaciones Simples Libres de 2 Grados de Libertad (2 DOF)
- Concepto: Imaginemos dos masas ($m_1, m_2$) conectadas por tres resortes entre dos paredes fijas. El movimiento de una masa afecta inmediatamente a la otra. Necesitamos dos coordenadas ($x_1, x_2$) para describir el sistema.
- Ecuación Matricial:
- $$ \begin{bmatrix} m_1 & 0 \\ 0 & m_2 \end{bmatrix} \begin{Bmatrix} \ddot{x}_1 \\ \ddot{x}_2 \end{Bmatrix} + \begin{bmatrix} k_1+k_2 & -k_2 \\ -k_2 & k_2+k_3 \end{bmatrix} \begin{Bmatrix} x_1 \\ x_2 \end{Bmatrix} = \begin{Bmatrix} 0 \\ 0 \end{Bmatrix} $$
- Solución (Modos Normales): Al resolver el determinante $\det([K] - \omega^2[M]) = 0$, obtenemos dos frecuencias naturales distintas ($\omega_1, \omega_2$).
- Modo 1 (Baja frecuencia): Las masas oscilan "en fase", moviéndose juntas hacia la derecha y luego juntas hacia la izquierda.
- Modo 2 (Alta frecuencia): Las masas oscilan "en antifase", acercándose y alejándose entre sí, comprimiendo fuertemente el resorte central.
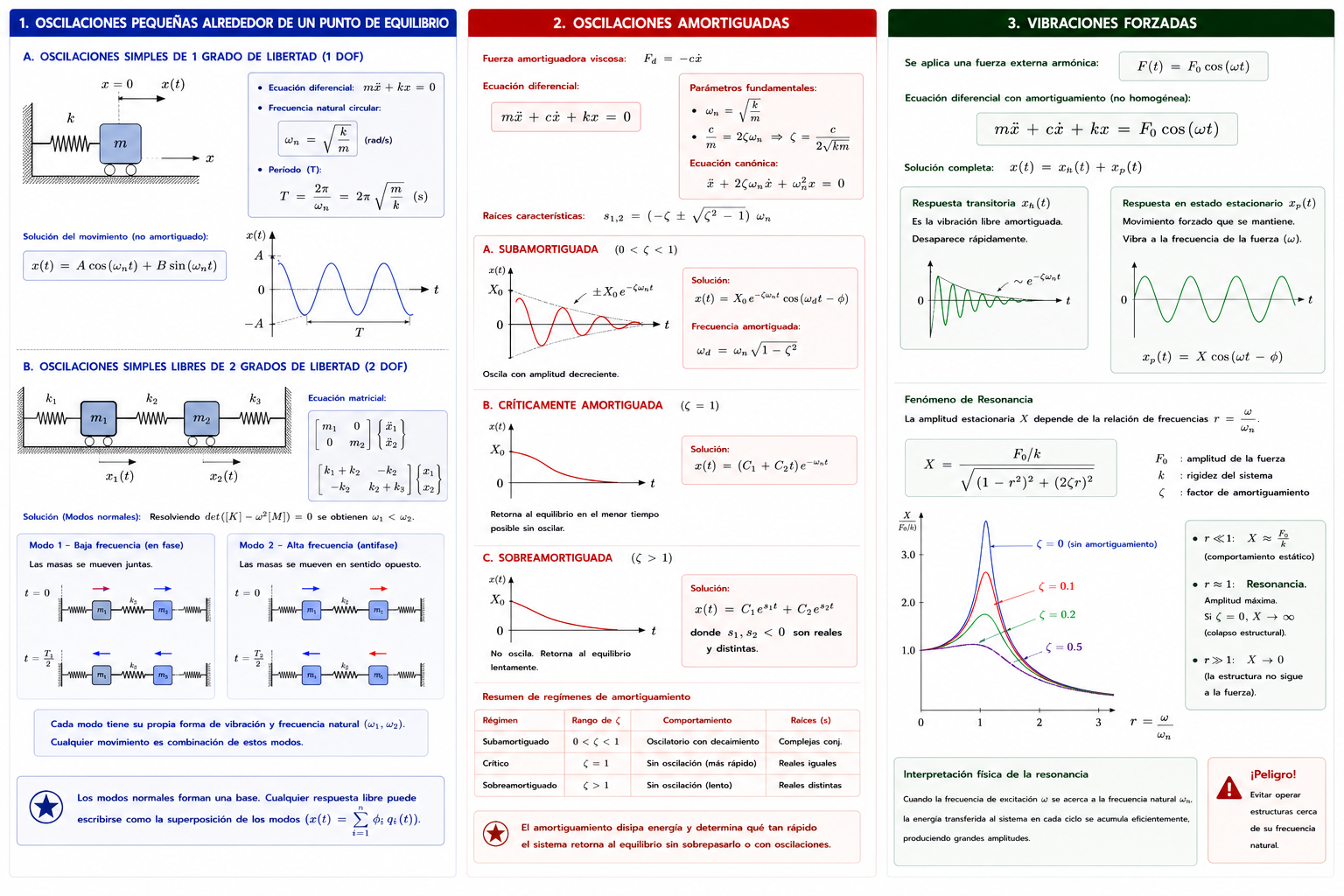
2. Oscilaciones Amortiguadas
En la realidad, la fricción del aire o las fricciones internas del material disipan energía. La oscilación libre no dura para siempre.
Fuerza Amortiguadora Viscosa:
Asumimos que la fuerza de fricción es directamente proporcional a la velocidad de la masa, pero en sentido opuesto: $F_d = -c\dot{x}$. (Donde $c$ es el coeficiente de amortiguamiento viscoso).
La EDO se modifica a:
$$ m\ddot{x} + c\dot{x} + kx = 0 $$
Dividiendo por la masa $m$, introducimos dos parámetros fundamentales de diseño:
- Frecuencia natural: $\omega_n^2 = k/m$
- Factor de Amortiguamiento ($\zeta$): $\frac{c}{m} = 2\zeta\omega_n \implies \zeta = \frac{c}{2\sqrt{km}}$
La EDO canónica es: $\ddot{x} + 2\zeta\omega_n\dot{x} + \omega_n^2x = 0$
Las raíces características son: $s_{1,2} = (-\zeta \pm \sqrt{\zeta^2 - 1})\omega_n$.
Dependiendo del valor de $\zeta$ (zeta), existen tres regímenes:
A. Oscilación Subamortiguada ($0 < \zeta < 1$)
- Concepto: El amortiguamiento es débil (como la suspensión de un auto en buen estado). Las raíces son complejas conjugadas.
- Respuesta: El sistema oscila, pero su amplitud decae exponencialmente con el tiempo.
- Fórmula: $x(t) = X_0 e^{-\zeta\omega_n t} \cos(\omega_d t - \phi)$
- (Donde $\omega_d = \omega_n\sqrt{1-\zeta^2}$ es la frecuencia amortiguada, que es ligeramente menor que la frecuencia natural).
B. Oscilación Críticamente Amortiguada ($\zeta = 1$)
- Concepto: Es la frontera exacta. El amortiguamiento es exactamente suficiente para evitar cualquier oscilación (como el mecanismo de cierre lento de una puerta).
- Respuesta: El sistema retorna a la posición de equilibrio $x=0$ en el menor tiempo posible, sin cruzarla ni una sola vez.
C. Oscilación Sobreamortiguada ($\zeta > 1$)
- Concepto: El amortiguamiento es excesivamente fuerte (como mover una cuchara dentro de miel muy espesa). Las raíces son reales y negativas.
- Respuesta: El sistema no oscila. Retorna a la posición de equilibrio lentamente, tomando más tiempo que en el caso crítico.
3. Vibraciones Forzadas
Concepto:
¿Qué sucede si, en lugar de perturbar el sistema y dejarlo libre, aplicamos una fuerza externa oscilatoria continua? (Ej. Un motor desbalanceado vibrando encima de una viga de acero).
Supongamos una fuerza excitadora armónica: $F(t) = F_0 \cos(\omega t)$, donde $\omega$ es la frecuencia de la máquina impulsora (no confundir con $\omega_n$, la frecuencia estructural natural).
La EDO con amortiguamiento se vuelve no homogénea:
$$ m\ddot{x} + c\dot{x} + kx = F_0 \cos(\omega t) $$
La solución completa es la suma de dos partes: $x(t) = x_h(t) + x_p(t)$.
- Respuesta Transitoria ($x_h$): Es la vibración libre amortiguada. Esta parte desaparece (se apaga) rápidamente debido al decaimiento exponencial ($e^{-\zeta\omega_n t}$).
- Respuesta en Estado Estacionario ($x_p$): Es el movimiento forzado que se mantiene para siempre mientras la fuerza siga actuando. La estructura se ve obligada a vibrar a la misma frecuencia de la máquina ($\omega$), pero con un "retraso" o fase diferente.
- $$ x_p(t) = X \cos(\omega t - \phi) $$
El Fenómeno de Resonancia:
La amplitud final de la estructura ($X$) depende críticamente de la Relación de Frecuencias ($r = \omega / \omega_n$).
$$ X = \frac{F_0/k}{\sqrt{(1 - r^2)^2 + (2\zeta r)^2}} $$
- Si $\omega$ es muy baja ($r \approx 0$), la estructura se mueve con amplitud estática $F_0/k$.
- Si $\omega$ coincide exactamente con $\omega_n$ ($r = 1$), el denominador se vuelve muy pequeño (dependiendo solo de $2\zeta$). Esto es la Resonancia. La amplitud $X$ se vuelve gigantesca y teóricamente infinita si no hay amortiguamiento ($\zeta = 0$). Este es el escenario de colapso estructural.