VIBRACIONES
Paul R
Autor Principal • Engineering Vault
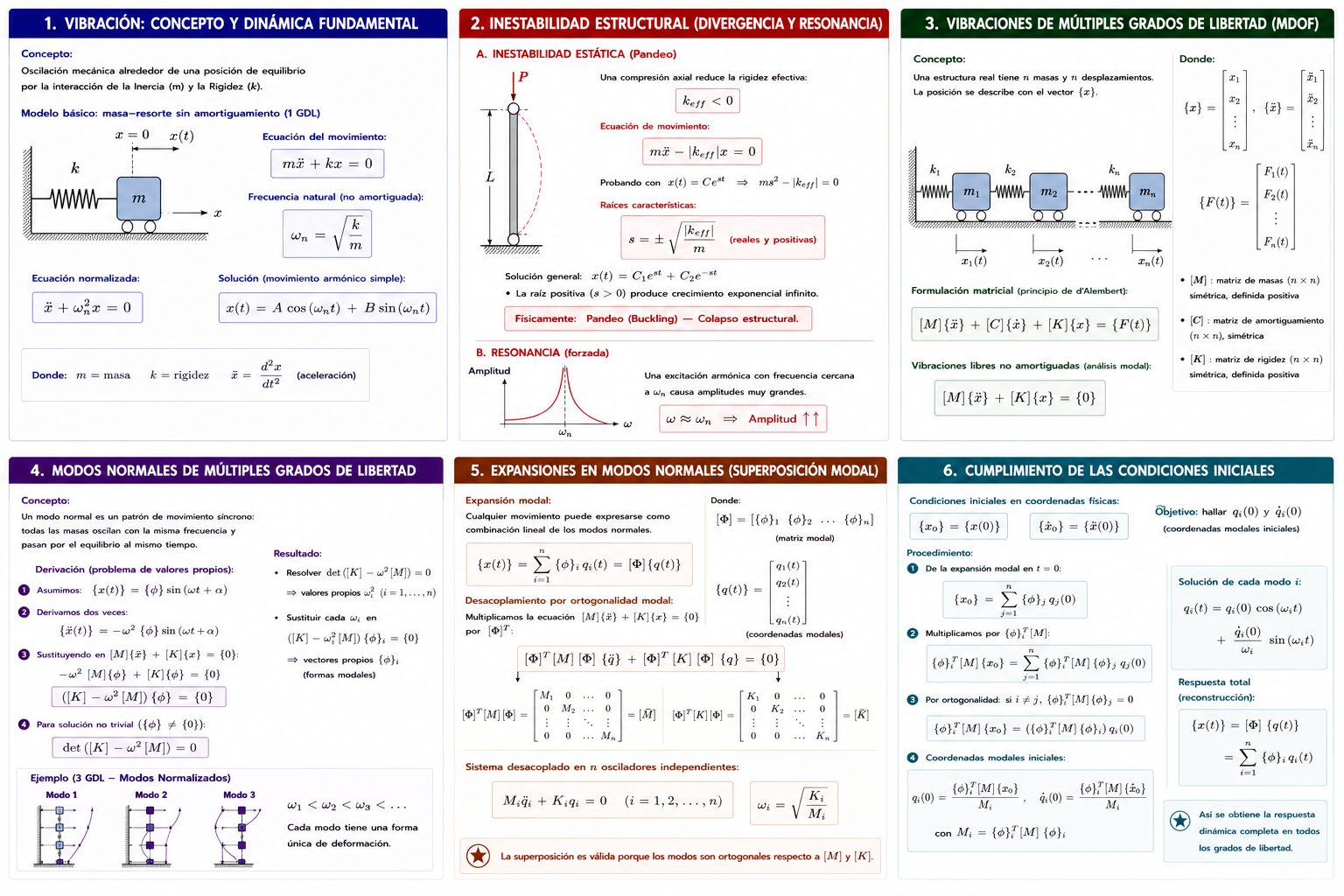
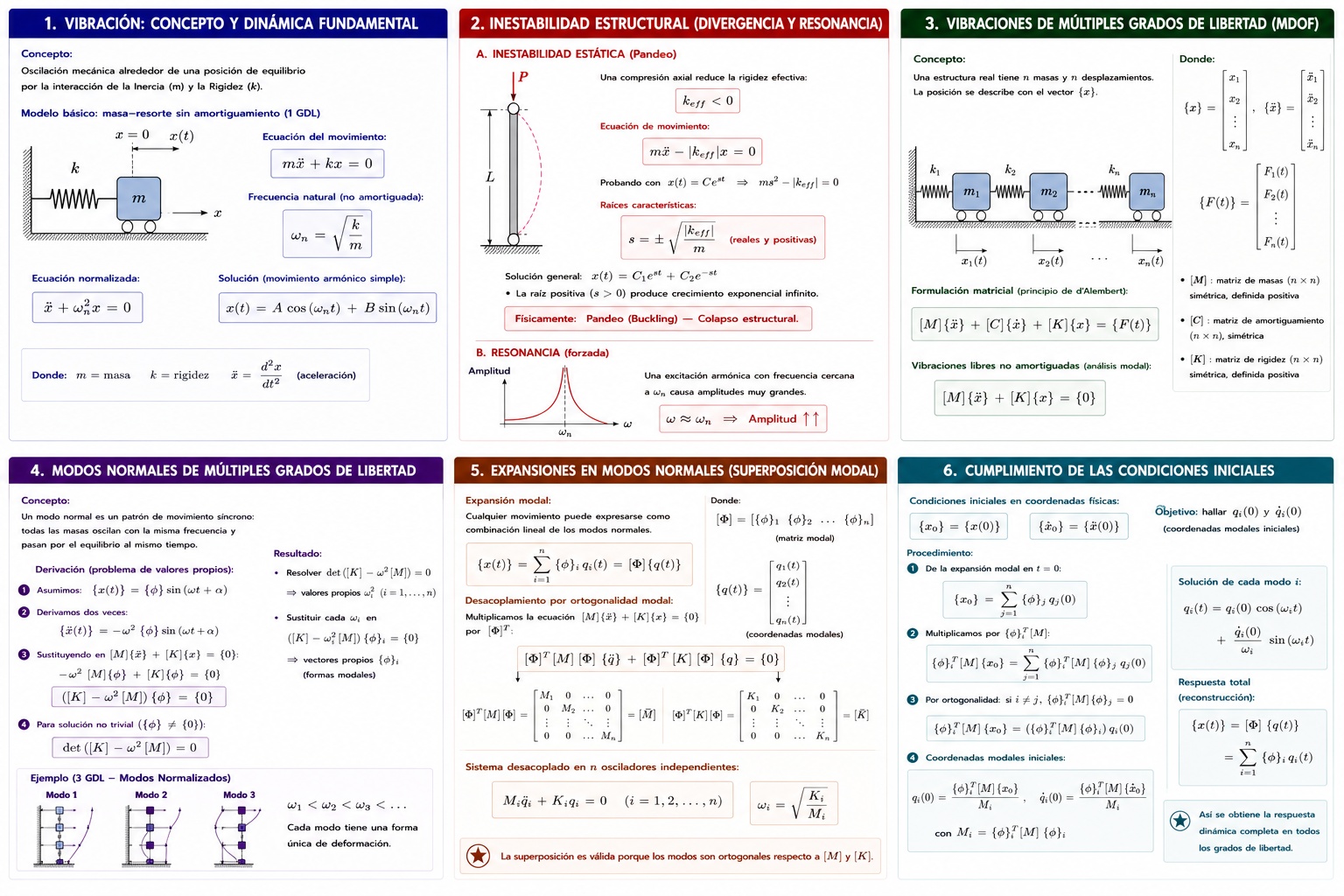
1. VIBRACIÓN: Concepto y Dinámica Fundamental
Concepto:
Una vibración es la oscilación mecánica de un sistema alrededor de una posición de equilibrio estable. Se produce por la interacción de dos propiedades fundamentales de la materia: la Inercia (masa, que tiende a mantener el movimiento) y la Rigidez (fuerza restauradora, que intenta devolver el sistema al equilibrio).
Modelo Básico (1 Grado de Libertad):
Para un sistema masa-resorte sin amortiguamiento, la Segunda Ley de Newton establece la Ecuación Diferencial Ordinaria (EDO) del movimiento:
$$ m\ddot{x} + kx = 0 $$
(Donde $\ddot{x}$ es la aceleración $\frac{d^2x}{dt^2}$, $m$ es la masa y $k$ es la rigidez).
Dividiendo por $m$, obtenemos la frecuencia natural no amortiguada ($\omega_n$):
$$ \ddot{x} + \omega_n^2 x = 0 \quad \implies \quad \omega_n = \sqrt{\frac{k}{m}} $$
La solución a esta EDO demuestra que el movimiento es puramente armónico (senoidal):
$$ x(t) = A \cos(\omega_n t) + B \sin(\omega_n t) $$
2. INESTABILIDAD ESTRUCTURAL (Divergencia y Resonancia)
Concepto:
La inestabilidad ocurre cuando las vibraciones de un sistema, en lugar de mantenerse acotadas o disiparse, crecen exponencialmente con el tiempo hasta provocar el colapso estructural.
Demostración Analítica de Inestabilidad Estática (Pandeo):
Supongamos que un sistema estructural es sometido a una fuerza de compresión axial que contrarresta su rigidez natural, resultando en una rigidez efectiva negativa ($k_{eff} < 0$).
La EDO se vuelve:
$$ m\ddot{x} - |k_{eff}|x = 0 $$
Al asumir una solución de la forma $x(t) = C e^{st}$, la ecuación característica es $m s^2 - |k_{eff}| = 0$.
Las raíces de $s$ ya no son imaginarias (oscilatorias), sino reales y positivas:
$$ s = \pm \sqrt{\frac{|k_{eff}|}{m}} $$
La raíz positiva genera la solución $x(t) = C e^{st}$, lo que demuestra matemáticamente un crecimiento exponencial infinito. Físicamente, esto describe el Pandeo (Buckling) de una columna.
3. VIBRACIONES DE MÚLTIPLES GRADOS DE LIBERTAD (MDOF)
Concepto:
Una estructura real (como un edificio de 6 pisos) no es una sola masa puntual. Necesitamos un modelo de Múltiples Grados de Libertad (MDOF), donde la posición del sistema se define mediante un vector de coordenadas $\{x\}$.
Formulación Matricial:
El principio de d'Alembert y la Segunda Ley de Newton se expanden utilizando álgebra lineal. Las masas, el amortiguamiento y la rigidez de toda la estructura se ensamblan en matrices cuadradas simétricas $n \times n$:
$$ [M]\{\ddot{x}\} + [C]\{\dot{x}\} + [K]\{x\} = \{F(t)\} $$
Para el análisis fundamental de vibraciones libres no amortiguadas (crucial para hallar las propiedades intrínsecas de la estructura), la ecuación se reduce a:
$$ [M]\{\ddot{x}\} + [K]\{x\} = \{0\} $$
4. MODOS NORMALES DE MÚLTIPLES GRADOS DE LIBERTAD
Concepto:
Un "Modo Normal" o "Modo de Vibración" es un patrón de movimiento síncrono. Cuando una estructura vibra en un modo normal, todas las masas del sistema se mueven con la misma frecuencia armónica y pasan por su posición de equilibrio al mismo tiempo, aunque con diferentes amplitudes.
Demostración (El Problema de Valores Propios):
Asumimos que la estructura vibra sincrónicamente con una frecuencia $\omega$ y una "forma" o perfil de deformación dado por el vector invariante $\{\phi\}$:
$$ \{x(t)\} = \{\phi\} \sin(\omega t + \alpha) $$
Derivando dos veces obtenemos las aceleraciones:
$$ \{\ddot{x}(t)\} = -\omega^2 \{\phi\} \sin(\omega t + \alpha) $$
Sustituyendo en la ecuación matricial MDOF general $[M]\{\ddot{x}\} + [K]\{x\} = \{0\}$:
$$ -\omega^2 [M]\{\phi\} + [K]\{\phi\} = \{0\} $$
$$ ([K] - \omega^2 [M])\{\phi\} = \{0\} $$
Para que exista una solución no trivial ($\{\phi\} \neq 0$), el determinante de la matriz dinámica debe ser rigurosamente cero:
$$ \det([K] - \omega^2 [M]) = 0 $$
Resolver este polinomio de grado $n$ arroja los Valores Propios (Eigenvalues) $\omega_i^2$, que son las frecuencias naturales de la estructura. Al sustituir cada $\omega_i$ de vuelta en la ecuación, obtenemos los Vectores Propios (Eigenvectors) $\{\phi\}_i$, que son las formas de los Modos Normales.
5. EXPANSIONES EN MODOS NORMALES (Superposición Modal)
Concepto:
El Teorema de Expansión establece que el movimiento complejo y aparentemente caótico de cualquier estructura lineal es simplemente la suma algebraica (superposición) de sus modos normales de vibración.
Demostración Matemática (Desacoplamiento):
Cualquier vector de desplazamiento espacial $\{x(t)\}$ puede expresarse como una combinación lineal de los vectores modales $\{\phi\}_i$ multiplicados por unas coordenadas dependientes del tiempo llamadas coordenadas generalizadas o modales $q_i(t)$:
$$ \{x(t)\} = \sum_{i=1}^n \{\phi\}_i q_i(t) = [\Phi]\{q(t)\} $$
(Donde $[\Phi]$ es la matriz modal que contiene todos los vectores propios en sus columnas).
El verdadero poder de esta expansión radica en la Propiedad de Ortogonalidad de los modos de vibración. Si multiplicamos la ecuación diferencial original por la matriz modal transpuesta $[\Phi]^T$, las matrices de masa y rigidez se vuelven diagonales:
$$ [\Phi]^T [M] [\Phi] \{\ddot{q}\} + [\Phi]^T [K] [\Phi] \{q\} = \{0\} $$
Esto transforma un inmenso sistema acoplado de ecuaciones complejas en $n$ ecuaciones diferenciales totalmente independientes y simples:
$$ M_i \ddot{q}_i + K_i q_i = 0 $$
Donde $M_i$ es la masa modal y $K_i$ es la rigidez modal para el modo $i$.
6. EL CUMPLIMIENTO DE LAS CONDICIONES INICIALES
Concepto:
Para predecir el movimiento exacto de la estructura, debemos conocer cómo fue perturbada en el instante $t=0$. Se requieren los vectores de desplazamiento inicial $\{x_0\}$ y velocidad inicial $\{\dot{x}_0\}$. El desafío es convertir estas condiciones del mundo real a nuestras nuevas "coordenadas modales" $q_i(0)$.
Procedimiento Matemático:
Sabemos por la expansión modal que:
$$ \{x_0\} = \sum_{j=1}^n \{\phi\}_j q_j(0) $$
Para aislar una coordenada específica $q_i(0)$, multiplicamos ambos lados de la ecuación por el vector modal transpuesto $\{\phi\}_i^T$ y por la matriz de masa $[M]$:
$$ \{\phi\}_i^T [M] \{x_0\} = \sum_{j=1}^n \{\phi\}_i^T [M] \{\phi\}_j q_j(0) $$
Por la propiedad de ortogonalidad respecto a la masa, si $i \neq j$, el producto $\{\phi\}_i^T [M] \{\phi\}_j$ es igual a cero. Por lo tanto, toda la sumatoria colapsa a un único término donde $i=j$:
$$ \{\phi\}_i^T [M] \{x_0\} = (\{\phi\}_i^T [M] \{\phi\}_i) q_i(0) $$
Despejando, obtenemos las ecuaciones finales de transformación de condiciones iniciales (un equivalente escalar directo):
$$ q_i(0) = \frac{\{\phi\}_i^T [M] \{x_0\}}{\{\phi\}_i^T [M] \{\phi\}_i} = \frac{\{\phi\}_i^T [M] \{x_0\}}{M_i} $$
Análogamente, para la velocidad inicial modal:
$$ \dot{q}_i(0) = \frac{\{\phi\}_i^T [M] \{\dot{x}_0\}}{M_i} $$
Una vez resuelto cada oscilador modal independiente $q_i(t) = q_i(0) \cos(\omega_i t) + \frac{\dot{q}_i(0)}{\omega_i} \sin(\omega_i t)$, simplemente usamos la matriz de superposición $\{x(t)\} = [\Phi]\{q(t)\}$ para obtener la respuesta dinámica final de cada nodo de la estructura a lo largo del tiempo.