SEGUNDA LEY DE NEWTON PARA EL ESTUDIO DEL SÓLIDO RÍGIDO
Paul R
Autor Principal • Engineering Vault

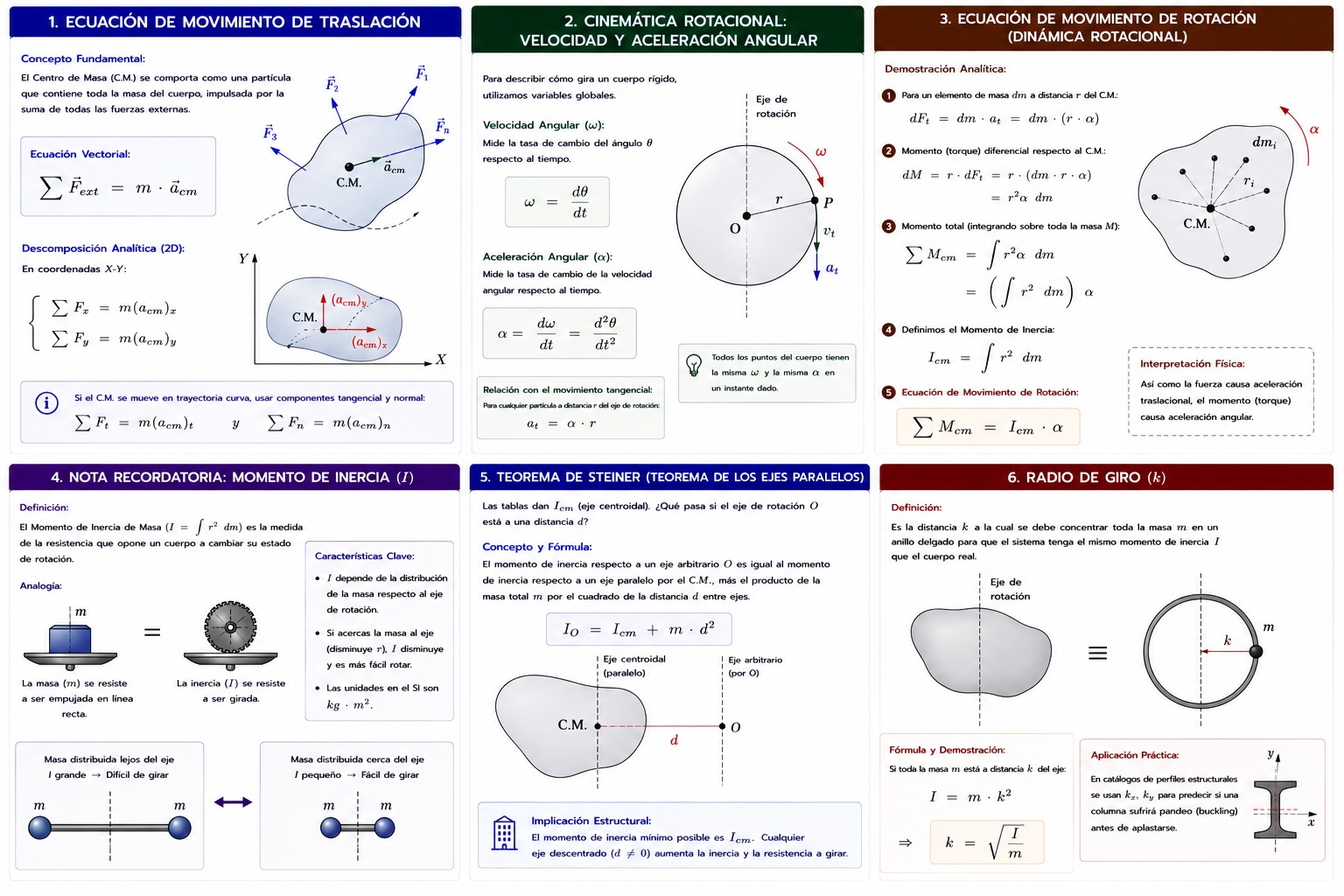
1. Ecuación de Movimiento de Traslación
Concepto Fundamental:
Para cualquier sólido rígido (sin importar su forma geométrica o cómo esté rotando internamente), el Centro de Masa (C.M.) se comporta dinámicamente de la manera más sencilla posible: se traslada exactamente como si fuera una sola partícula puntual que contiene toda la masa del cuerpo, impulsada por la suma de todas las fuerzas externas.
Ecuación Vectorial:
$$ \sum \vec{F}_{ext} = m \cdot \vec{a}_{cm} $$
Descomposición Analítica (2D):
En un análisis de movimiento plano (coordenadas $X-Y$), esta ecuación vectorial se divide en dos ecuaciones escalares independientes:
$$ \sum F_x = m (a_{cm})_x $$
$$ \sum F_y = m (a_{cm})_y $$
(Nota: Si el centro de masa está restringido a moverse en una trayectoria curva, es más conveniente descomponer la aceleración en componentes tangencial y normal: $\sum F_t = m (a_{cm})_t$ y $\sum F_n = m (a_{cm})_n$).
2. Cinemática Rotacional: Velocidad y Aceleración Angular
Para describir cómo gira un cuerpo, no podemos usar la velocidad lineal (metros por segundo), ya que cada punto del disco o rueda viaja a una velocidad distinta dependiendo de qué tan lejos esté del centro. Necesitamos variables globales que apliquen a todo el cuerpo por igual.
- Velocidad Angular ($\omega$): Mide la tasa de cambio del ángulo $\theta$ respecto al tiempo. Todos los puntos de un cuerpo rígido comparten exactamente la misma velocidad angular en un instante dado.
- $$ \omega = \frac{d\theta}{dt} $$
- Aceleración Angular ($\alpha$): Mide la tasa de cambio de la velocidad angular respecto al tiempo.
- $$ \alpha = \frac{d\omega}{dt} = \frac{d^2\theta}{dt^2} $$
Relación con el movimiento tangencial: Para cualquier partícula a una distancia $r$ del eje de rotación, su aceleración tangencial lineal se demuestra como $a_t = \alpha \cdot r$.
3. Ecuación de Movimiento de Rotación (Dinámica Rotacional)
Así como la fuerza causa aceleración traslacional, el Momento de una fuerza (Torque) causa aceleración angular. Esta es la extensión rotacional de la Segunda Ley de Newton.
Demostración Analítica:
Imaginemos un cuerpo rígido rotando alrededor de un eje que pasa por su Centro de Masa (C.M.). El cuerpo está compuesto por infinitas partículas diferenciales de masa $dm$.
Para una partícula $dm$ ubicada a una distancia $r$ del C.M., la fuerza tangencial necesaria para acelerarla es:
$$ dF_t = dm \cdot a_t $$
Sustituyendo $a_t = r \cdot \alpha$:
$$ dF_t = dm \cdot (r \cdot \alpha) $$
El momento (torque) $dM$ que ejerce esta fuerza diferencial respecto al centro es fuerza por distancia:
$$ dM = r \cdot dF_t = r \cdot (dm \cdot r \cdot \alpha) = r^2 \alpha \, dm $$
Para hallar el momento total necesario para hacer girar todo el cuerpo sólido, integramos sobre toda la masa $M$:
$$ \sum M_{cm} = \int r^2 \alpha \, dm $$
Como el cuerpo es rígido, la aceleración angular $\alpha$ es la misma para todas las partículas, por lo que sale de la integral:
$$ \sum M_{cm} = \left( \int r^2 \, dm \right) \alpha $$
La integral del paréntesis es una propiedad geométrica del cuerpo llamada Momento de Inercia ($I_{cm}$). Reemplazando, obtenemos la Ecuación de Movimiento de Rotación:
$$ \sum M_{cm} = I_{cm} \cdot \alpha $$
4. Nota Recordatoria: Momento de Inercia ($I$)
Definición de Momento de Inercia:
El Momento de Inercia de Masa ($I = \int r^2 \, dm$) es la medida matemática de la resistencia que opone un cuerpo a cambiar su estado de rotación.
Analogía: Así como la masa ($m$) se resiste a ser empujada en línea recta, la inercia ($I$) se resiste a ser girada.
Característica Clave: A diferencia de la masa, el momento de inercia no es un valor único para un objeto. Depende estrictamente de cómo esté distribuida la masa respecto al eje de rotación. Si acercas la masa al eje (como un patinador sobre hielo cerrando los brazos), el radio $r$ disminuye, $I$ se vuelve más pequeño, y es mucho más fácil rotar (aceleración angular mayor). Las unidades en el SI son $kg \cdot m^2$.
5. Teorema de Steiner (Teorema de los Ejes Paralelos)
Las tablas de ingeniería suelen proporcionar los momentos de inercia de perfiles geométricos exclusivamente respecto a su eje centroidal ($I_{cm}$). Sin embargo, ¿qué sucede si el diseño requiere que el cuerpo gire respecto a un pasador o bisagra ubicado en un extremo, muy lejos del centro de masa?
Para no tener que resolver integrales complejas desde cero, utilizamos el Teorema de Steiner.
Concepto y Fórmula:
El teorema establece que el momento de inercia de un cuerpo respecto a cualquier eje arbitrario ($I_O$) es igual al momento de inercia respecto a un eje paralelo que pase por su Centro de Masa ($I_{cm}$), más el producto de la masa total del cuerpo ($m$) por el cuadrado de la distancia perpendicular ($d$) que separa ambos ejes paralelos.
$$ I_O = I_{cm} + m \cdot d^2 $$
Implicación Estructural:
La ecuación demuestra que el momento de inercia mínimo posible que puede tener un objeto siempre es $I_{cm}$. Cualquier intento de hacerlo girar descentrado (al agregar $+ m \cdot d^2$) aumentará su resistencia a rotar.
6. Radio de Giro ($k$)
El Radio de Giro es un parámetro puramente conceptual que los ingenieros utilizan para simplificar o normalizar datos geométricos complejos.
Definición:
Imagina que tomas toda la masa de un cuerpo sólido geométricamente irregular y la concentras en un solo anillo infinitamente delgado. El Radio de Giro ($k$) es la distancia desde el eje de rotación a la cual deberías ubicar este anillo para que el sistema resultante tenga exactamente el mismo Momento de Inercia ($I$) que el cuerpo original sólido y real.
Fórmula y Demostración:
Si concentramos toda la masa $m$ a una distancia $k$, la ecuación básica de inercia nos dice que:
$$ I = m \cdot k^2 $$
Despejando $k$, obtenemos su definición analítica:
$$ k = \sqrt{\frac{I}{m}} $$
Aplicación Práctica:
En los catálogos de perfiles de acero estructural, los fabricantes suelen listar el área de la sección transversal, su momento de inercia, y el radio de giro ($k_x, k_y$). El radio de giro es el parámetro fundamental para predecir si una columna va a sufrir pandeo (buckling) antes de aplastarse bajo una carga de compresión.