REPASO DE MECÁNICA VECTORIAL
Paul R
Autor Principal • Engineering Vault
1. Vectores
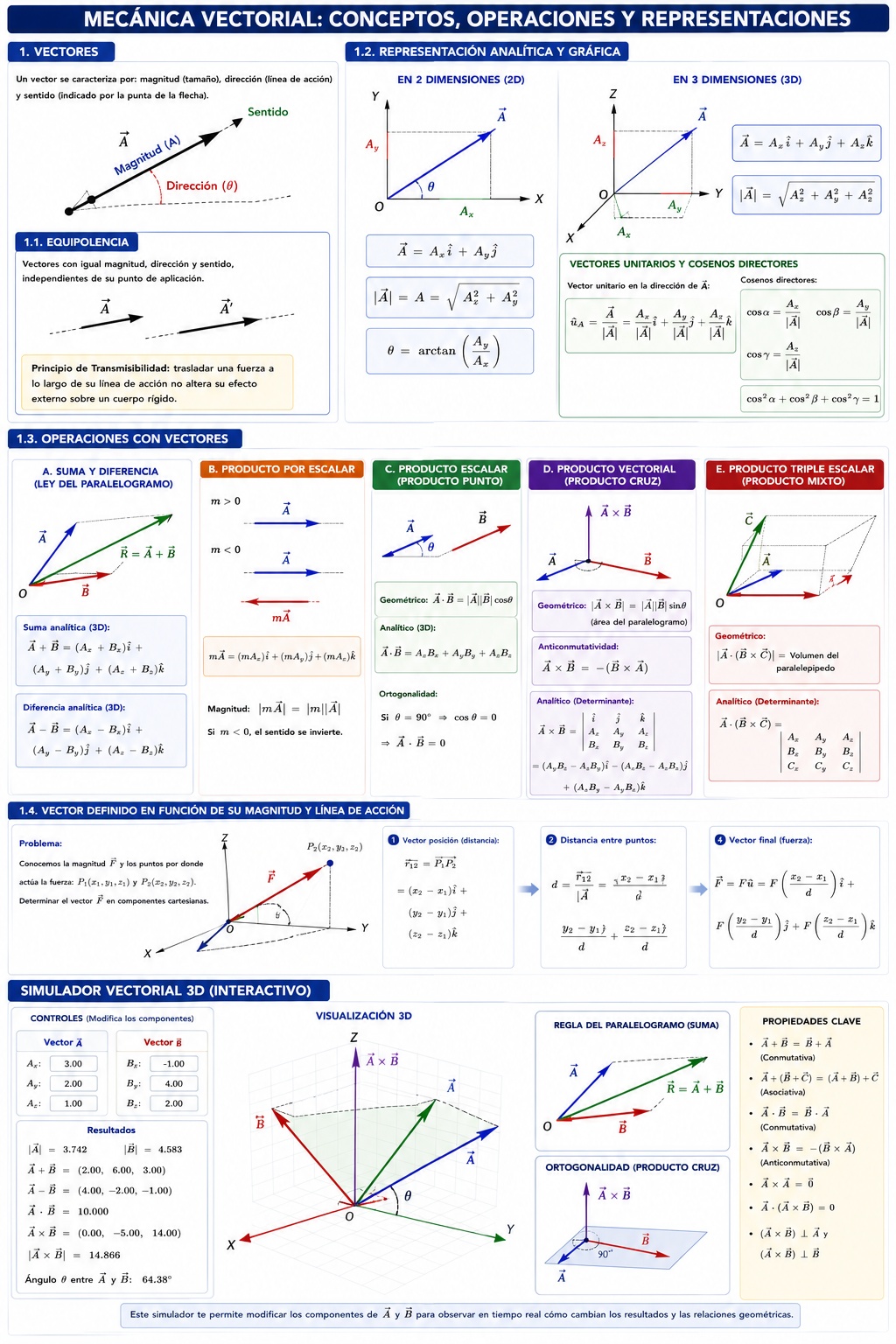
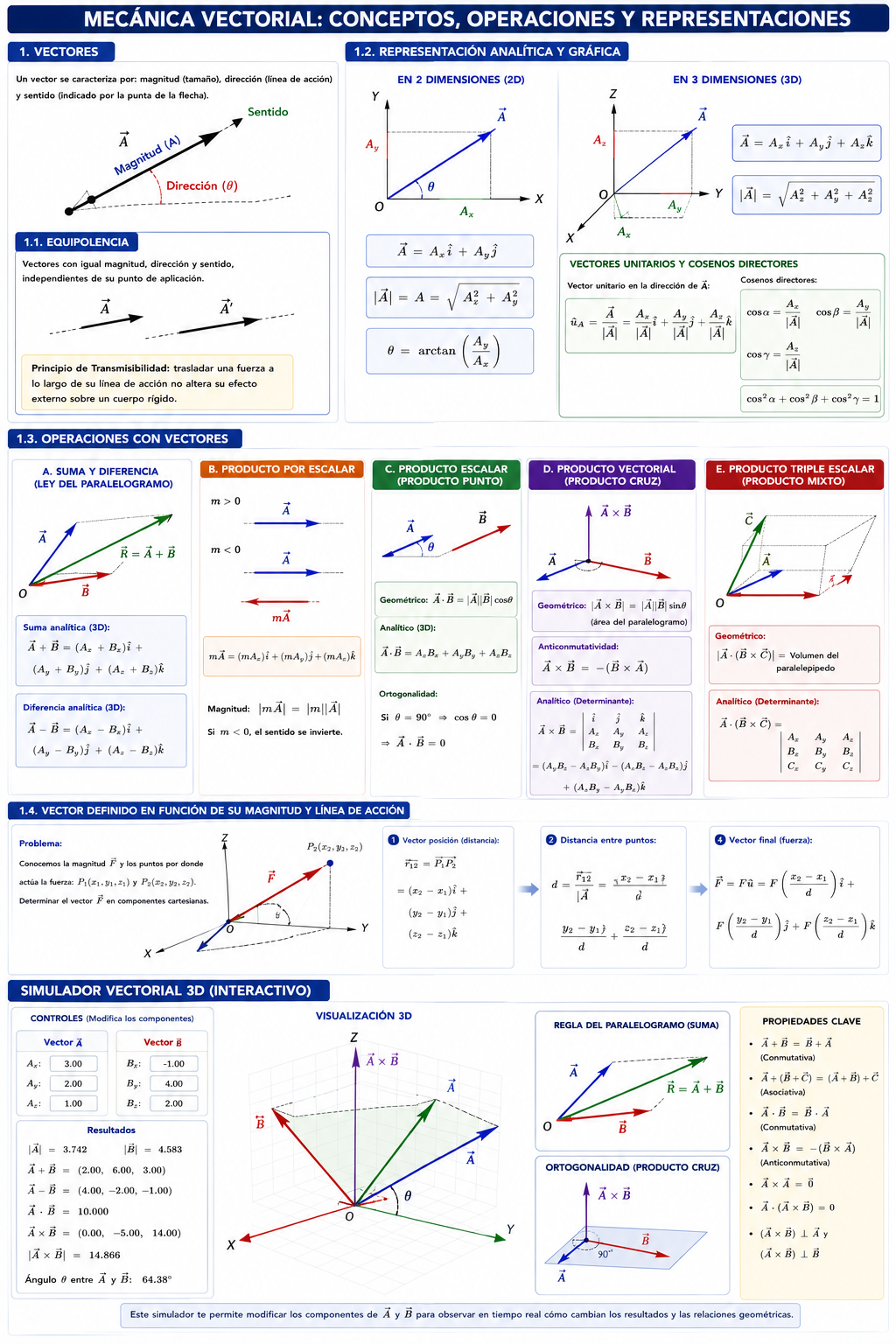
Un vector es un ente matemático definido por tres atributos esenciales: magnitud (módulo o tamaño), dirección (línea de acción o ángulo) y sentido (indicado por la punta de la flecha).
1.1. Equipolencia
Dos o más vectores son equipolentes si tienen exactamente la misma magnitud, la misma dirección (son paralelos) y el mismo sentido, sin importar dónde se encuentre su punto de aplicación.
- Concepto físico: En mecánica de cuerpos rígidos, los vectores equipolentes son considerados vectores "libres" o "deslizantes", ya que trasladar una fuerza a lo largo de su línea de acción no altera su efecto externo sobre el cuerpo (Principio de Transmisibilidad).
1.2. Representación analítica y gráfica
Sistemas de coordenadas en dos dimensiones (2D):
En el plano, un vector se representa en el sistema cartesiano mediante dos ejes ortogonales ($X$, $Y$).
$$ \vec{A} = A_x \hat{i} + A_y \hat{j} $$
Su magnitud se demuestra por el Teorema de Pitágoras:
$$ |\vec{A}| = A = \sqrt{A_x^2 + A_y^2} $$
Su dirección está dada por el ángulo $\theta$ respecto al eje horizontal: $\theta = \arctan\left(\frac{A_y}{A_x}\right)$.
Sistemas de coordenadas en tres dimensiones (3D):
En el espacio, se añade el eje $Z$, formando un triedro ortogonal que sigue la regla de la mano derecha.
$$ \vec{A} = A_x \hat{i} + A_y \hat{j} + A_z \hat{k} $$
Su magnitud espacial es:
$$ |\vec{A}| = \sqrt{A_x^2 + A_y^2 + A_z^2} $$
Nota sobre Vectores Unitarios:
Un vector unitario ($\hat{u}$ o $\vec{\lambda}$) es un vector que tiene una magnitud exactamente igual a 1 y carece de unidades físicas. Su única función es indicar dirección. Se obtienen dividiendo un vector cualquiera entre su propia magnitud:
$$ \hat{u}_A = \frac{\vec{A}}{|\vec{A}|} = \frac{A_x}{|\vec{A}|}\hat{i} + \frac{A_y}{|\vec{A}|}\hat{j} + \frac{A_z}{|\vec{A}|}\hat{k} $$
Las fracciones $\frac{A_x}{|\vec{A}|}$, $\frac{A_y}{|\vec{A}|}$ y $\frac{A_z}{|\vec{A}|}$ se conocen como los cosenos directores ($\cos\alpha, \cos\beta, \cos\gamma$).
1.3. Operaciones con Vectores
A. Operaciones algebraicas: Suma y Diferencia
La suma o resta geométrica obedece la ley del paralelogramo o del polígono. Analíticamente, se realiza sumando o restando las componentes homólogas:
$$ \vec{A} \pm \vec{B} = (A_x \pm B_x)\hat{i} + (A_y \pm B_y)\hat{j} + (A_z \pm B_z)\hat{k} $$
B. Producto de un vector por un escalar
Al multiplicar un vector $\vec{A}$ por un número real $m$, se obtiene un nuevo vector $m\vec{A}$. La magnitud se multiplica por $|m|$. Si $m$ es negativo, el sentido del vector se invierte.
$$ m\vec{A} = (mA_x)\hat{i} + (mA_y)\hat{j} + (mA_z)\hat{k} $$
C. Producto Escalar (Producto Punto)
Es una operación que toma dos vectores y devuelve un número (escalar). Representa la proyección de un vector sobre la línea de acción del otro.
- Fórmula geométrica: $\vec{A} \cdot \vec{B} = |\vec{A}| |\vec{B}| \cos\theta$
- Fórmula analítica: $\vec{A} \cdot \vec{B} = A_x B_x + A_y B_y + A_z B_z$
- Demostración de Ortogonalidad: Si dos vectores son perpendiculares ($\theta = 90^\circ$), entonces $\cos(90^\circ) = 0$, por lo que su producto escalar es invariablemente cero ($\vec{A} \cdot \vec{B} = 0$).
D. Producto Vectorial (Producto Cruz)
Es una operación que toma dos vectores y devuelve un nuevo vector que es estrictamente perpendicular al plano formado por los dos vectores originales.
- Fórmula geométrica: Su magnitud es $|\vec{A} \times \vec{B}| = |\vec{A}| |\vec{B}| \sin\theta$. Geométricamente, esta magnitud es igual al área del paralelogramo formado por $\vec{A}$ y $\vec{B}$.
- Demostración de Anticonmutatividad: Por la regla de la mano derecha, si invertimos el orden, el vector resultante apunta en sentido opuesto: $\vec{A} \times \vec{B} = -(\vec{B} \times \vec{A})$.
- Fórmula analítica (Determinante):
- $$ \vec{A} \times \vec{B} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ A_x & A_y & A_z \\ B_x & B_y & B_z \end{vmatrix} = (A_y B_z - A_z B_y)\hat{i} - (A_x B_z - A_z B_x)\hat{j} + (A_x B_y - A_y B_x)\hat{k} $$
E. Producto Triple Escalar (Producto Mixto)
Combina el producto punto y el cruz: $\vec{A} \cdot (\vec{B} \times \vec{C})$.
- Concepto geométrico: El resultado absoluto de esta operación es igual al volumen del paralelepípedo que tiene a los tres vectores como aristas.
- Fórmula analítica:
- $$ \vec{A} \cdot (\vec{B} \times \vec{C}) = \begin{vmatrix} A_x & A_y & A_z \\ B_x & B_y & B_z \\ C_x & C_y & C_z \end{vmatrix} $$
1.4. Vector definido en función de su magnitud y línea de acción
En la práctica de la ingeniería, es muy común conocer la magnitud de una fuerza (ej. la tensión en un cable es de $500\text{ N}$) y saber desde qué punto arranca y a qué punto está atado, pero no conocer sus componentes cartesianas.
Demostración analítica:
Supongamos que un vector fuerza $\vec{F}$ tiene una magnitud conocida $F$, y actúa a lo largo de una línea de acción que pasa por los puntos $P_1(x_1, y_1, z_1)$ y $P_2(x_2, y_2, z_2)$.
- Vector Posición (Distancia): Primero, trazamos un vector geométrico $\vec{r}_{12}$ desde el origen de la fuerza hasta el destino.
- $$ \vec{r}_{12} = (x_2 - x_1)\hat{i} + (y_2 - y_1)\hat{j} + (z_2 - z_1)\hat{k} $$
- Magnitud de la distancia: Calculamos la distancia física real $d$ entre los dos puntos.
- $$ d = |\vec{r}_{12}| = \sqrt{(x_2 - x_1)^2 + (y_2 - y_1)^2 + (z_2 - z_1)^2} $$
- Vector Unitario: Dividimos el vector posición entre la distancia para extraer puramente la dirección en forma de vector unitario $\hat{u}$.
- $$ \hat{u} = \frac{\vec{r}_{12}}{d} $$
- Construcción del Vector Final: Multiplicamos nuestra magnitud escalar conocida $F$ por el vector unitario $\hat{u}$ que acabamos de descubrir.
- $$ \vec{F} = F \hat{u} = F \left( \frac{x_2 - x_1}{d} \right)\hat{i} + F \left( \frac{y_2 - y_1}{d} \right)\hat{j} + F \left( \frac{z_2 - z_1}{d} \right)\hat{k} $$