REACCIONES EN APOYOS Y CONEXIONES: CASOS ESPECIALES DE EQUILIBRIO
Paul R
Autor Principal • Engineering Vault
El análisis del equilibrio de cuerpos rígidos es el paso fundacional para el diseño de cualquier estructura mecánica o civil. Para que un cuerpo se mantenga en reposo absoluto, se deben cumplir las Leyes de Newton, lo que implica que la sumatoria de fuerzas y la sumatoria de momentos (torques) deben ser estrictamente cero.
Sin embargo, los cuerpos no flotan libremente; están sujetos mediante apoyos y conexiones. A continuación, presento la investigación detallada sobre cómo se modelan estas restricciones y los teoremas que simplifican su análisis.
1. Reacciones en Apoyos y Conexiones (Sistemas 2D y 3D)
Concepto Fundamental:
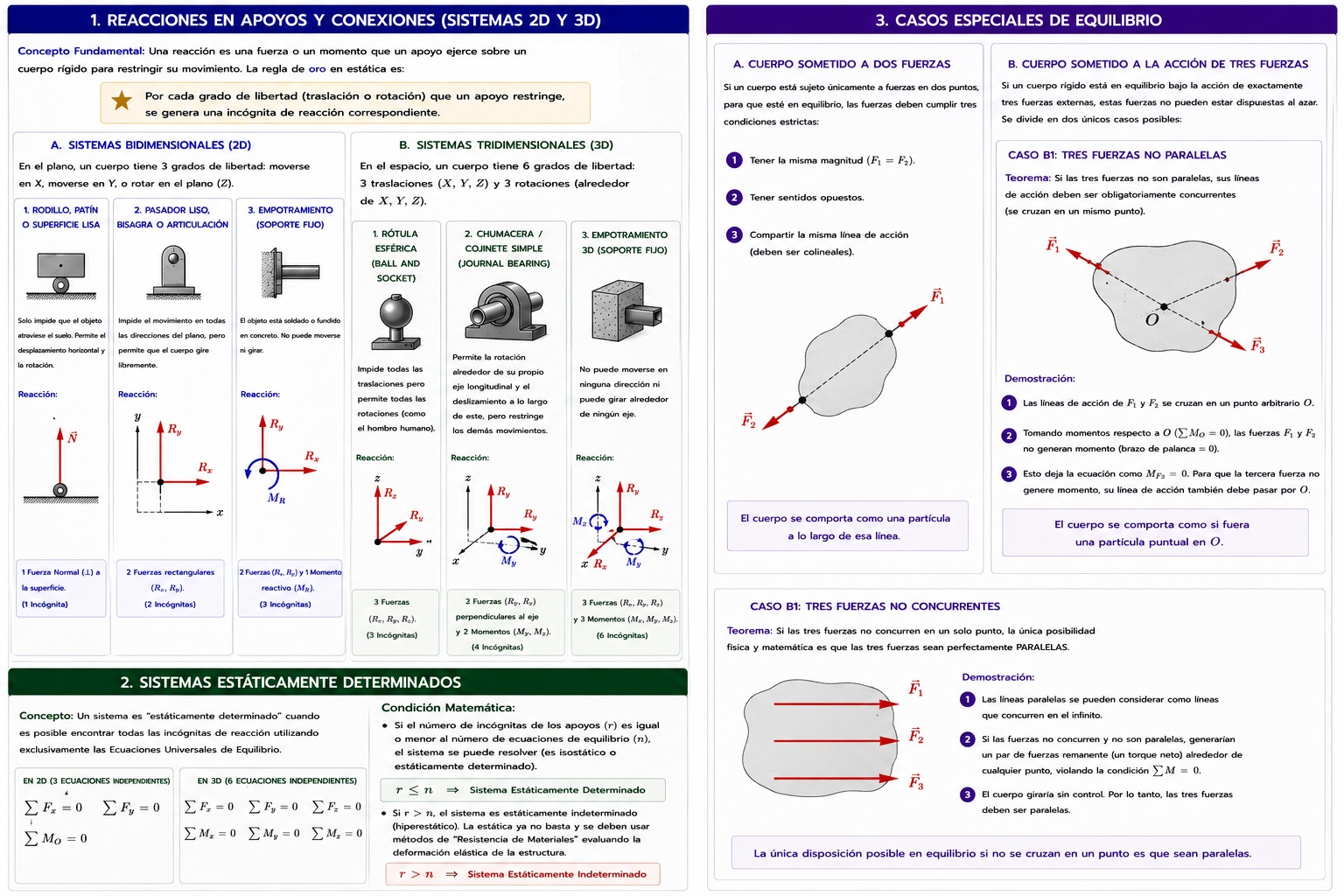
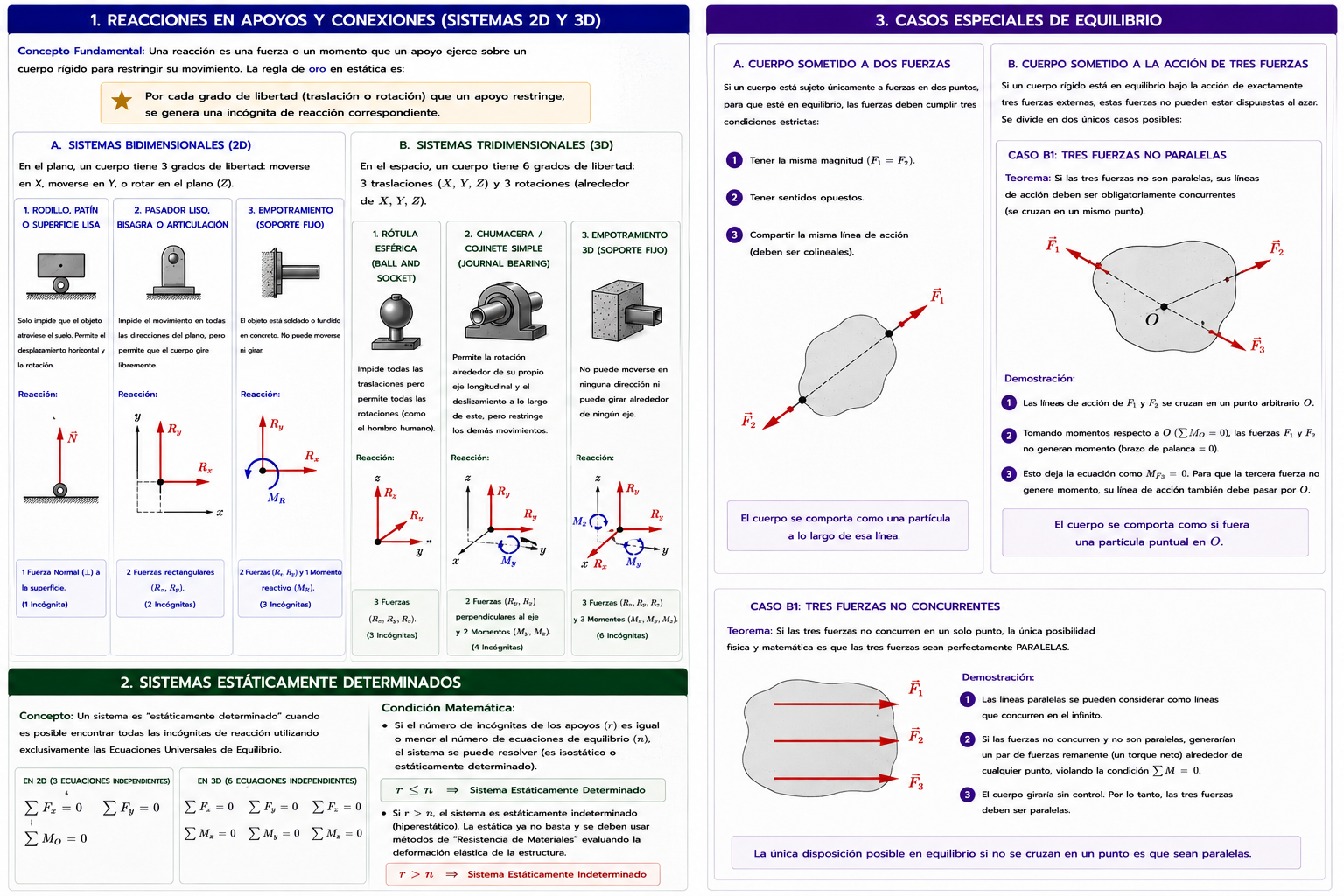
Una reacción es una fuerza o un momento que un apoyo ejerce sobre un cuerpo rígido para restringir su movimiento. La regla de oro en estática es: "Por cada grado de libertad (traslación o rotación) que un apoyo restringe, se genera una incógnita de reacción correspondiente".
A. Sistemas Bidimensionales (2D)
En el plano, un cuerpo tiene 3 grados de libertad: moverse en $X$, moverse en $Y$, o rotar en el plano ($Z$).
- Rodillo, Patín o Superficie Lisa: Solo impide que el objeto atraviese el suelo. Permite el desplazamiento horizontal y la rotación.
- Reacción: 1 Fuerza Normal ($\perp$) a la superficie. (1 Incógnita).
- Pasador Liso, Bisagra o Articulación: Impide el movimiento en todas las direcciones del plano, pero permite que el cuerpo gire libremente.
- Reacción: 2 Fuerzas rectangulares ($R_x$, $R_y$). (2 Incógnitas).
- Empotramiento (Soporte Fijo): El objeto está soldado o fundido en concreto. No puede moverse ni girar.
- Reacción: 2 Fuerzas ($R_x$, $R_y$) y 1 Momento reactivo ($M_R$). (3 Incógnitas).
B. Sistemas Tridimensionales (3D)
En el espacio, un cuerpo tiene 6 grados de libertad: 3 traslaciones ($X, Y, Z$) y 3 rotaciones (alrededor de $X, Y, Z$).
- Rótula Esférica (Ball and Socket): Impide todas las traslaciones pero permite todas las rotaciones (como el hombro humano).
- Reacción: 3 Fuerzas ($R_x, R_y, R_z$). (3 Incógnitas).
- Chumacera / Cojinete Simple (Journal Bearing): Permite la rotación alrededor de su propio eje longitudinal y el deslizamiento a lo largo de este, pero restringe los demás movimientos.
- Reacción: 2 Fuerzas perpendiculares al eje y 2 Momentos. (4 Incógnitas).
- Empotramiento 3D:
- Reacción: 3 Fuerzas y 3 Momentos (6 Incógnitas).
2. Sistemas Estáticamente Determinados
Concepto:
Un sistema es "estáticamente determinado" cuando es posible encontrar todas las incógnitas de reacción utilizando exclusivamente las Ecuaciones Universales de Equilibrio.
- En 2D, disponemos de 3 ecuaciones algebraicas independientes:
- $$ \sum F_x = 0, \quad \sum F_y = 0, \quad \sum M_O = 0 $$
- En 3D, disponemos de 6 ecuaciones algebraicas independientes:
- $$ \sum F_x = 0, \sum F_y = 0, \sum F_z = 0 $$
- $$ \sum M_x = 0, \sum M_y = 0, \sum M_z = 0 $$
Condición Matemática:
Si el número de incógnitas de los apoyos ($r$) es igual o menor al número de ecuaciones de equilibrio ($n$), el sistema se puede resolver (es isostático o estáticamente determinado).
Si $r > n$, el sistema es estáticamente indeterminado (hiperestático). La estática ya no basta y se deben usar métodos de "Resistencia de Materiales" evaluando la deformación elástica de la estructura.
3. Casos Especiales de Equilibrio
La identificación de casos especiales permite a los ingenieros resolver problemas complejos casi por simple inspección visual, reduciendo drásticamente los cálculos algebraicos.
A. Cuerpo Sometido a Dos Fuerzas
Si un cuerpo de cualquier forma está sujeto únicamente a fuerzas en dos puntos (por ejemplo, un eslabón, un tirante o una biela), para que esté en equilibrio, las fuerzas deben cumplir tres condiciones estrictas:
- Tener la misma magnitud ($F_1 = F_2$).
- Tener sentidos opuestos.
- Compartir la misma línea de acción (deben ser colineales).
B. Cuerpo Sometido a la Acción de Tres Fuerzas
Este es uno de los teoremas más hermosos de la estática. Si un cuerpo rígido está en equilibrio bajo la acción de exactamente tres fuerzas externas, estas fuerzas no pueden estar dispuestas al azar. Se divide en dos únicos casos posibles:
Caso B1: Cuerpo sometido a tres fuerzas NO PARALELAS
- Teorema: Si las tres fuerzas no son paralelas, sus líneas de acción deben ser obligatoriamente concurrentes (es decir, deben cruzarse exactamente en un mismo punto geométrico, ya sea dentro o fuera del cuerpo).
- Demostración: Supongamos tres fuerzas $\vec{F}_1, \vec{F}_2, \vec{F}_3$. Como no son paralelas, la geometría dicta que las líneas de acción de $\vec{F}_1$ y $\vec{F}_2$ se cruzarán en un punto arbitrario que llamaremos $O$.
- Si aplicamos la condición de equilibrio rotacional tomando momentos respecto a ese punto $O$ ($\sum M_O = 0$), las fuerzas $\vec{F}_1$ y $\vec{F}_2$ no generan ningún momento porque su brazo de palanca es cero.
- Esto deja la ecuación como: $M_{\vec{F}3} = 0$. Para que la tercera fuerza no genere momento, su brazo de palanca también debe ser cero, lo que demuestra matemáticamente que la línea de acción de $\vec{F}_3$ debe pasar por el punto $O$. El cuerpo se comporta como si fuera una partícula puntual.
Caso B2: Cuerpo sometido a tres fuerzas NO CONCURRENTES
- Teorema: Si el cuerpo está en equilibrio bajo tres fuerzas, y está demostrado visualmente que las líneas de acción de estas fuerzas no concurren en un solo punto, la única posibilidad física y matemática es que las tres fuerzas sean perfectamente PARALELAS.
- Demostración Geométrica: Se puede pensar en las líneas paralelas como líneas que concurren en el infinito. Si las fuerzas no concurren y no son paralelas, generarían un par de fuerzas remanente (un torque neto) alrededor de cualquier punto de intersección, violando la condición $\sum M = 0$, provocando que el cuerpo gire sin control.