MÉTODOS DE LA ENERGÍA: ECUACIONES DE LAGRANGE
Paul R
Autor Principal • Engineering Vault
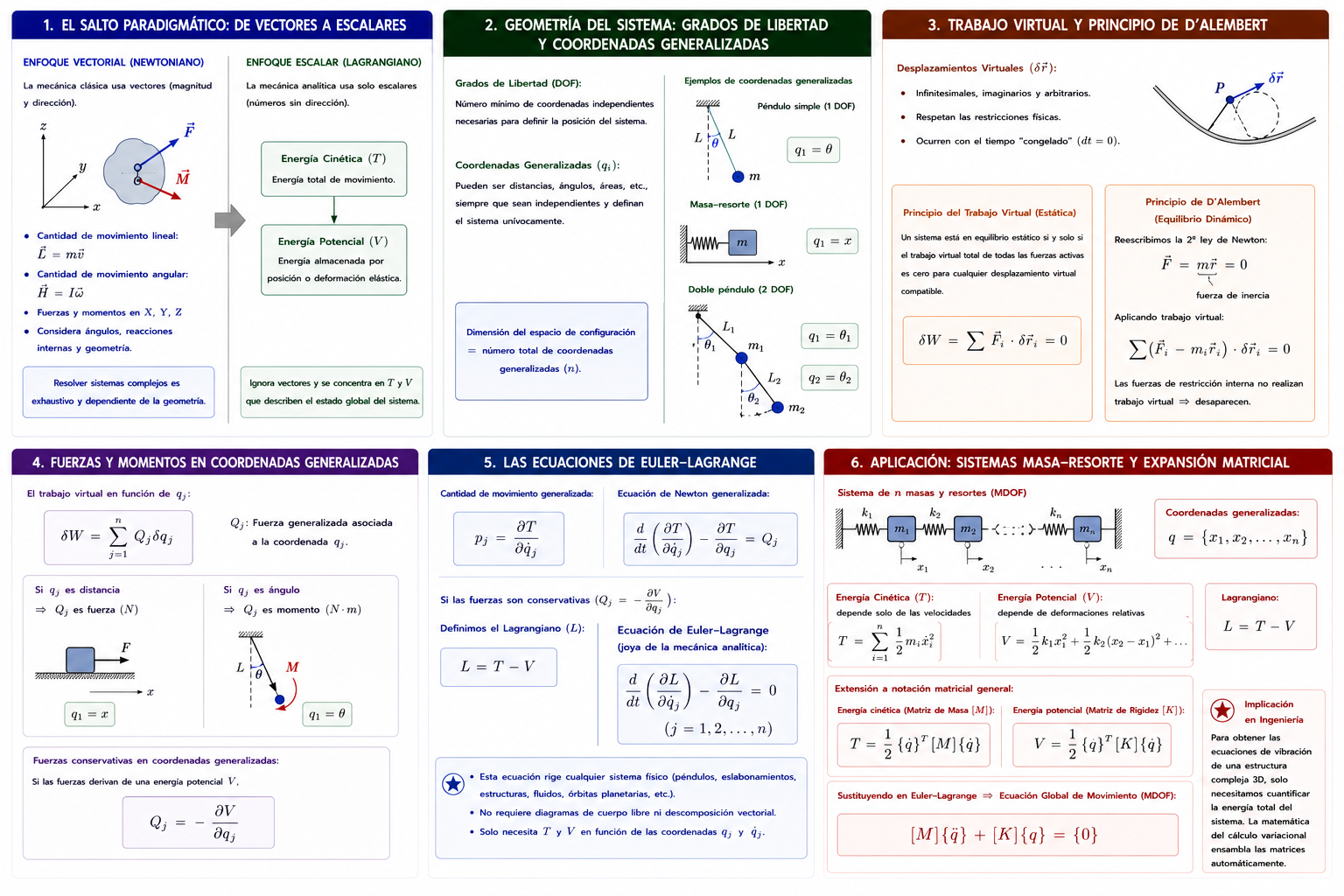
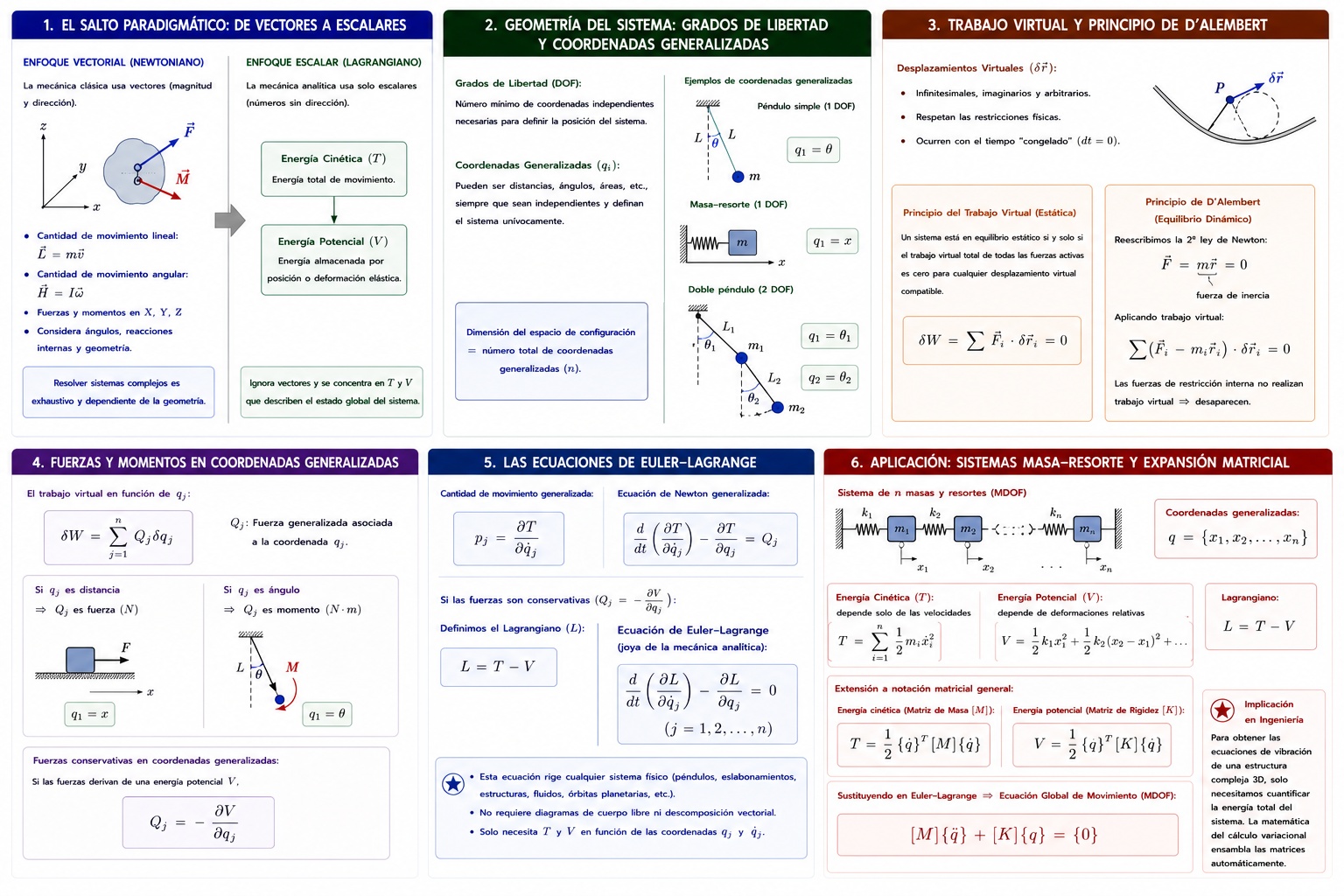
1. El Salto Paradigmático: De Vectores a Escalares
El Enfoque Vectorial (Newtoniano):
La mecánica clásica se fundamenta en vectores, los cuales tienen magnitud y dirección. Resolver un sistema implica rastrear la Cantidad de Movimiento Lineal ($\vec{L} = m\vec{v}$), la Cantidad de Movimiento Angular ($\vec{H} = I\vec{\omega}$) y todas las fuerzas/momentos en los ejes $X, Y, Z$. En sistemas articulados o restringidos, lidiar con la geometría de los ángulos y las fuerzas de reacción internas es exhaustivo.
El Enfoque Escalar (Lagrangiano):
La mecánica analítica ignora los vectores y se concentra exclusivamente en dos cantidades escalares (números puros sin dirección) que describen el estado global del sistema:
- Energía Cinética ($T$): La energía total de movimiento.
- Energía Potencial ($V$): La energía almacenada por posición o deformación elástica.
2. Geometría del Sistema: Grados de Libertad y Coordenadas Generalizadas
Para usar la energía, primero debemos definir matemáticamente la geometría del sistema.
- Grados de Libertad (DOF): Es el número mínimo de coordenadas independientes estrictamente necesarias para describir la posición exacta de todas las masas de un sistema en cualquier instante.
- Coordenadas Generalizadas ($q_i$): A diferencia del enfoque cartesiano que fuerza a usar $x, y, z$, las coordenadas generalizadas $q_1, q_2, \dots, q_n$ pueden ser cualquier conjunto de variables geométricas. Pueden ser distancias lineales, ángulos de deflexión ($\theta$), o incluso áreas, siempre que sean independientes y definan el sistema unívocamente. Al número total de coordenadas generalizadas se le llama dimensión del espacio de configuración.
3. Trabajo Virtual y Principio de D'Alembert
El puente entre la estática vectorial y la mecánica analítica escalar es el concepto de trabajo virtual.
Desplazamientos Virtuales ($\delta \vec{r}$):
Son desplazamientos infinitesimales, imaginarios y arbitrarios que sufre el sistema. Tienen dos reglas estrictas:
- Deben respetar las restricciones físicas del sistema (ej. no pueden atravesar paredes o romper barras).
- Ocurren con el tiempo "congelado" ($dt = 0$).
Principio del Trabajo Virtual (Estática):
El trabajo virtual ($\delta W$) es el trabajo que realizarían las fuerzas activas del sistema si este sufriera un desplazamiento virtual. El principio establece que: "Un sistema mecánico está en equilibrio estático si y solo si el trabajo virtual total de todas las fuerzas activas es cero para cualquier desplazamiento virtual compatible."
$$ \delta W = \sum \vec{F}_i \cdot \delta \vec{r}_i = 0 $$
Principio de D'Alembert y Sistema de Equilibrio Dinámico:
Jean le Rond d'Alembert tomó la Segunda Ley de Newton ($\vec{F} = m\vec{a}$) y la reescribió como $\vec{F} - m\ddot{\vec{r}} = 0$.
Llamó al término $-m\ddot{\vec{r}}$ la fuerza de inercia. Esto permite tratar cualquier problema dinámico como si fuera un problema de estática (un sistema de equilibrio dinámico). Aplicando el trabajo virtual a este nuevo sistema, obtenemos el Principio de D'Alembert:
$$ \sum (\vec{F}_i - m_i \ddot{\vec{r}}_i) \cdot \delta \vec{r}_i = 0 $$
(La genialidad de esta ecuación es que las fuerzas de restricción interna, como las tensiones que mantienen unida una armadura, no realizan trabajo virtual y desaparecen de la ecuación).
4. Fuerzas y Momentos en Coordenadas Generalizadas
Si el trabajo virtual es un escalar, podemos expresarlo en función de nuestras coordenadas generalizadas $q_j$:
$$ \delta W = \sum_{j=1}^n Q_j \delta q_j $$
Donde $Q_j$ es la Fuerza Generalizada asociada a la coordenada $q_j$. (Si $q_j$ es una distancia geométrica, $Q_j$ es una fuerza real en Newtons; si $q_j$ es un ángulo, $Q_j$ es un momento o torque en $N\cdot m$).
Fuerzas Conservativas en Coordenadas Generalizadas:
Si las fuerzas que actúan sobre el sistema son conservativas, derivan de una función de Energía Potencial ($V$). En este caso, la fuerza generalizada se demuestra matemáticamente como el gradiente negativo del potencial respecto a esa coordenada:
$$ Q_j = -\frac{\partial V}{\partial q_j} $$
5. Las Ecuaciones de Euler-Lagrange
Para llegar a las ecuaciones de movimiento, introducimos un nuevo concepto: la Cantidad de Movimiento Generalizada ($p_j$).
En lugar de $p = mv$, la definimos a partir de la Energía Cinética ($T$):
$$ p_j = \frac{\partial T}{\partial \dot{q}_j} $$
La Ecuación de Newton Generalizada:
Joseph-Louis Lagrange demostró que la tasa de cambio temporal de esta cantidad de movimiento generalizada es igual a la fuerza generalizada más un término que compensa la geometría del marco de referencia móvil:
$$ \frac{d}{dt} \left( \frac{\partial T}{\partial \dot{q}_j} \right) - \frac{\partial T}{\partial q_j} = Q_j $$
La Ecuación de Euler-Lagrange:
Para sistemas donde las fuerzas son conservativas ($Q_j = -\frac{\partial V}{\partial q_j}$), podemos definir una función suprema llamada Lagrangiano ($L$), que es simplemente la diferencia entre la energía cinética y potencial:
$$ L = T - V $$
Al sustituir esto en la ecuación anterior (y sabiendo que $V$ no depende de las velocidades $\dot{q}_j$), se revela la joya de la corona de la mecánica analítica, la ecuación que rige cualquier sistema físico, desde péndulos dobles hasta órbitas planetarias:
$$ \frac{d}{dt}\left(\frac{\partial L}{\partial \dot{q}_j}\right) - \frac{\partial L}{\partial q_j} = 0 $$
6. Aplicación: Sistemas Masa-Resorte y Expansión Matricial
Para demostrar el poder de Lagrange en ingeniería estructural, apliquémoslo a un sistema de múltiples grados de libertad acoplado elásticamente (MDOF).
Supongamos un sistema de $n$ masas y resortes.
Nuestras coordenadas generalizadas son los desplazamientos horizontales: $q = \{x_1, x_2, \dots, x_n\}$.
- Energía Cinética ($T$): Depende solo de las velocidades.
- $$ T = \sum_{i=1}^n \frac{1}{2} m_i \dot{x}_i^2 $$
- Energía Potencial ($V$): Depende de las deformaciones relativas de los resortes entre las masas.
- $$ V = \frac{1}{2} k_1 x_1^2 + \frac{1}{2} k_2 (x_2 - x_1)^2 + \dots $$
- El Lagrangiano ($L$): $L = T - V$
Al aplicar el operador de Euler-Lagrange $\left( \frac{d}{dt}\frac{\partial L}{\partial \dot{x}_i} - \frac{\partial L}{\partial x_i} = 0 \right)$ a cada coordenada $x_i$, automáticamente generamos un sistema de ecuaciones diferenciales acopladas.
Extensión a Sistemas de Coordenadas Generales (Notación Matricial):
Para plataformas computacionales, la energía cinética de cualquier sistema estructural lineal se puede escribir como una forma cuadrática generalizada usando la Matriz de Masa $[M]$:
$$ T = \frac{1}{2} \{\dot{q}\}^T [M] \{\dot{q}\} $$
Y la energía potencial de deformación elástica usando la Matriz de Rigidez $[K]$:
$$ V = \frac{1}{2} \{q\}^T [K] \{q\} $$
Si sustituimos estas formas matriciales en las Ecuaciones de Euler-Lagrange, las derivadas vectoriales limpian matemáticamente los factores de $\frac{1}{2}$, resultando instantáneamente en la Ecuación Global de Movimiento para cualquier sistema MDOF:
$$ [M]\{\ddot{q}\} + [K]\{q\} = \{0\} $$
Implicación en Ingeniería: El enfoque de Lagrange nos demuestra que para encontrar las ecuaciones de vibración de una estructura compleja tridimensional, no necesitamos dibujar un solo diagrama de cuerpo libre ni descomponer vectores de fuerza. Solo necesitamos cuantificar la energía total del sistema en función de sus deformaciones y velocidades, y la matemática del cálculo variacional ensamblará las matrices de masa y rigidez automáticamente.