MOVIMIENTO: SISTEMAS DE PARTÍCULAS Y SÓLIDO RÍGIDO
Paul R
Autor Principal • Engineering Vault
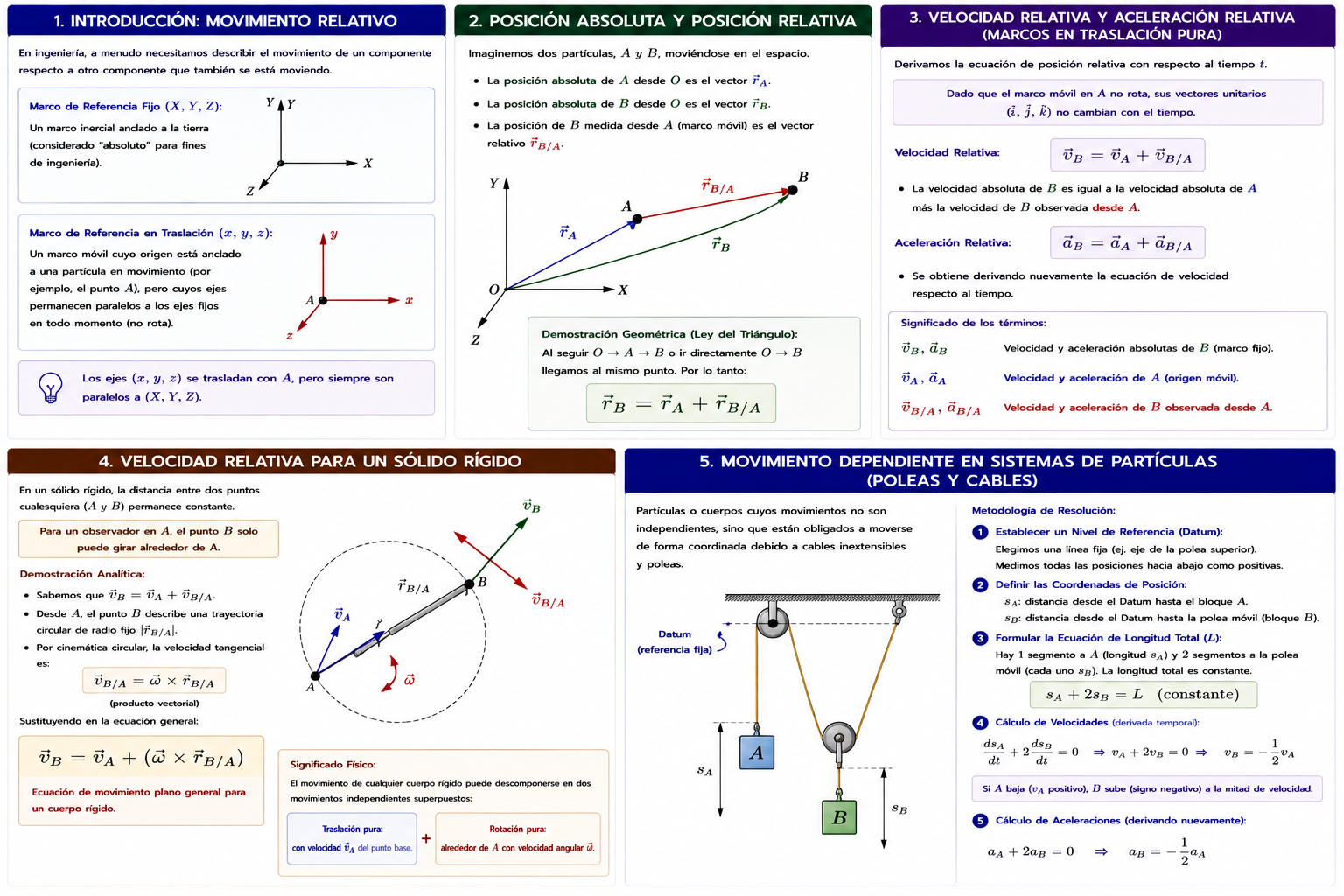
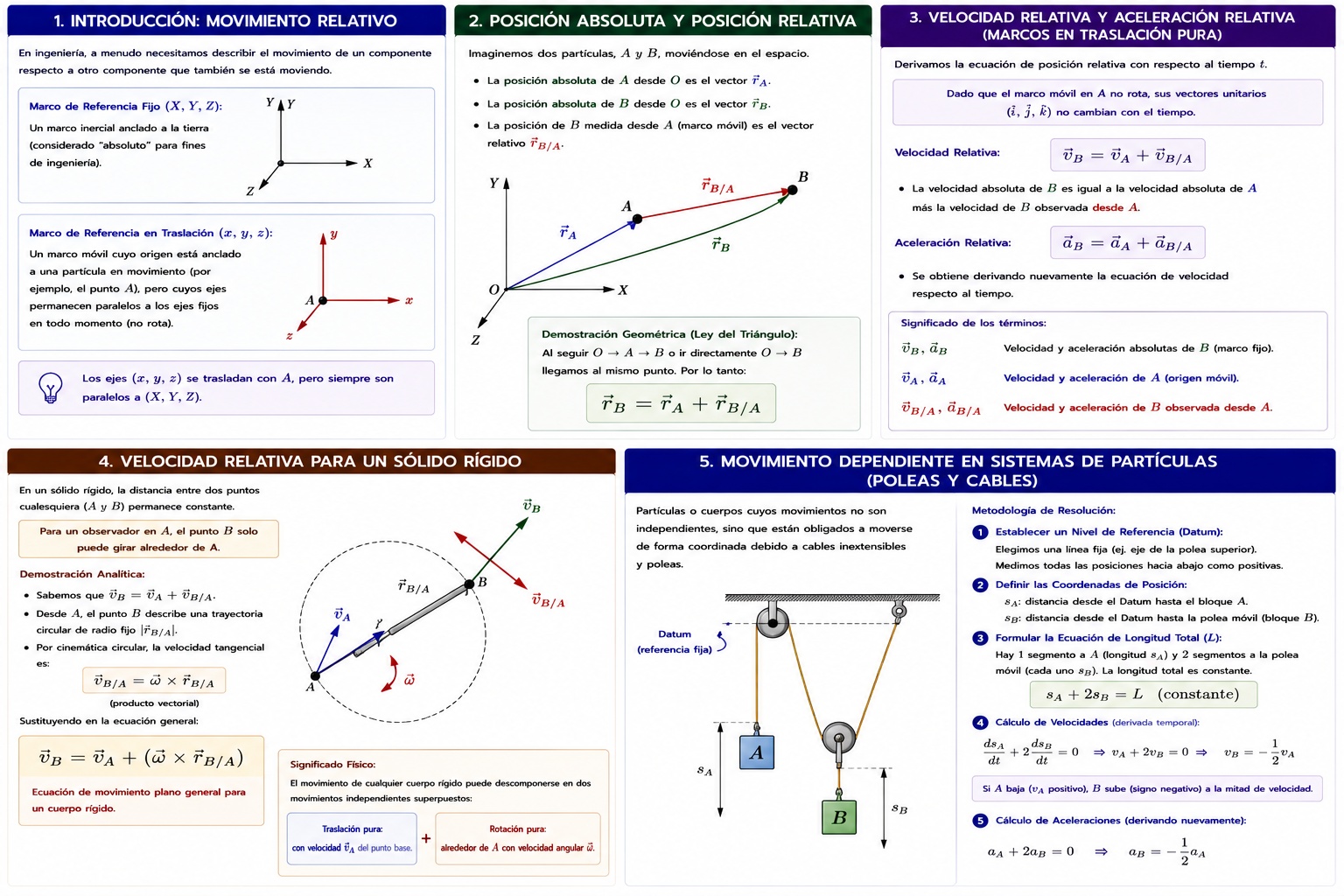
1. Introducción: Movimiento Relativo
En ingeniería, a menudo necesitamos describir el movimiento de un componente respecto a otro componente que también se está moviendo. Por ejemplo, el movimiento del pistón de un motor respecto a la biela, o el movimiento de un avión respecto a una corriente de aire móvil.
Para resolver esto, utilizamos dos sistemas de coordenadas:
- Marco de Referencia Fijo ($X, Y, Z$): Un marco inercial anclado a la tierra (considerado "absoluto" para fines de ingeniería).
- Marco de Referencia en Traslación ($x, y, z$): Un marco móvil cuyo origen está anclado a una partícula en movimiento (por ejemplo, el punto $A$), pero cuyos ejes permanecen paralelos a los ejes fijos en todo momento (no rota).
2. Posición Absoluta y Posición Relativa
Imaginemos dos partículas, $A$ y $B$, moviéndose en el espacio.
- La posición absoluta de $A$ desde el origen fijo $O$ es el vector $\vec{r}_A$.
- La posición absoluta de $B$ desde el origen fijo $O$ es el vector $\vec{r}_B$.
- Un observador situado en la partícula $A$ mide la posición de $B$ utilizando su propio marco móvil. A este vector se le llama vector de posición relativa de $B$ con respecto a $A$, denotado como $\vec{r}_{B/A}$.
Demostración Geométrica (Ley del Triángulo):
Si trazamos estos vectores, forman un triángulo vectorial cerrado. Siguiendo la trayectoria desde $O$ hasta $A$, y luego desde $A$ hasta $B$, llegamos al mismo punto que si fuéramos directo desde $O$ hasta $B$.
Por lo tanto, la Ecuación de Posición Relativa es:
$$ \vec{r}_B = \vec{r}_A + \vec{r}_{B/A} $$
3. Velocidad Relativa y Aceleración Relativa (Marcos en traslación pura)
Para obtener la velocidad, derivamos la ecuación de posición con respecto al tiempo ($t$).
$$ \frac{d}{dt}(\vec{r}_B) = \frac{d}{dt}(\vec{r}_A) + \frac{d}{dt}(\vec{r}_{B/A}) $$
Dado que el marco de referencia móvil en $A$ no está rotando, sus vectores unitarios orientacionales ($\hat{i}, \hat{j}, \hat{k}$) no cambian con el tiempo. Por lo tanto, la derivada del vector de posición relativa es simplemente la velocidad relativa medida por el observador en $A$.
Fórmula de Velocidad Relativa:
$$ \vec{v}_B = \vec{v}_A + \vec{v}_{B/A} $$
(La velocidad absoluta de $B$ es igual a la velocidad absoluta del marco $A$ más la velocidad de $B$ observada desde $A$).
Si volvemos a derivar con respecto al tiempo, obtenemos la Aceleración Relativa:
$$ \vec{a}_B = \vec{a}_A + \vec{a}_{B/A} $$
4. Velocidad Relativa para un Sólido Rígido
Aquí la física da un salto cualitativo. Un Sólido Rígido se define como un cuerpo en el que la distancia geométrica entre dos puntos cualesquiera ($A$ y $B$) permanece constante en el tiempo.
Si las partículas $A$ y $B$ pertenecen al mismo sólido rígido (por ejemplo, una biela de metal), la partícula $B$ no puede alejarse ni acercarse a $A$. Para un observador sentado en $A$, ¡la partícula $B$ solo puede girar a su alrededor!
Demostración Analítica:
Sabemos que $\vec{v}_B = \vec{v}_A + \vec{v}_{B/A}$.
Para el observador en $A$, el punto $B$ describe una trayectoria puramente circular de radio fijo $|\vec{r}_{B/A}|$.
Por cinemática circular, la velocidad tangencial de un punto rotando alrededor de un eje con velocidad angular $\vec{\omega}$ es el producto vectorial:
$$ \vec{v}_{B/A} = \vec{\omega} \times \vec{r}_{B/A} $$
Sustituyendo esto en la ecuación general, obtenemos la Ecuación de Movimiento Plano General para un cuerpo rígido:
$$ \vec{v}_B = \vec{v}_A + (\vec{\omega} \times \vec{r}_{B/A}) $$
- Significado Físico: El movimiento de cualquier cuerpo rígido en el espacio puede descomponerse en dos movimientos independientes superpuestos: una traslación pura con la velocidad de un punto base ($\vec{v}_A$) y una rotación pura alrededor de ese mismo punto base.
5. Movimiento Dependiente en Sistemas de Partículas (Poleas y Cables)
En ingeniería, frecuentemente encontramos partículas o cuerpos cuyos movimientos no son independientes, sino que están obligados a moverse de forma coordinada debido a ataduras mecánicas, típicamente cables inextensibles y poleas.
Para resolver la cinemática de estos sistemas, no usamos las Leyes de Newton, sino que formulamos una Ecuación de Ligadura basada en la geometría del sistema.
Metodología de Resolución (Ejemplo de 2 Bloques):
Supongamos un bloque $A$ colgando de un cable que sube a una polea fija superior, baja hasta una polea móvil inferior (que sostiene al bloque $B$), y vuelve a subir para anclarse en el techo.
- Establecer un Nivel de Referencia (Datum): Elegimos una línea fija, inamovible (como el eje de la polea superior del techo). Medimos todas las posiciones hacia abajo como positivas.
- Definir las Coordenadas de Posición:
- $s_A$ es la distancia desde el Datum hasta el bloque $A$.
- $s_B$ es la distancia desde el Datum hasta la polea móvil del bloque $B$.
- Formular la Ecuación de Longitud Total ($L$):
- Sumamos todos los segmentos de cable rectos. (Despreciamos las curvas sobre las poleas porque su longitud es constante y desaparecerá en la derivada).
- Hay 1 segmento de cable conectado a $A$: de longitud $s_A$.
- Hay 2 segmentos de cable conectados a la polea de $B$: cada uno de longitud $s_B$.
- La longitud total del cable es inalterable:
- $$ s_A + 2s_B = L $$
- Cálculo de Velocidades (Derivada Temporal):
- Derivamos la ecuación de posición con respecto al tiempo. La derivada de una constante ($L$) es cero.
- $$ \frac{ds_A}{dt} + 2 \frac{ds_B}{dt} = 0 $$
- $$ v_A + 2v_B = 0 \implies v_B = -\frac{1}{2} v_A $$
- Significado: Si el bloque $A$ se mueve hacia abajo ($v_A$ positivo) a $2 \text{ m/s}$, el bloque $B$ se moverá hacia arriba (signo negativo) a la mitad de la velocidad ($1 \text{ m/s}$).
- Cálculo de Aceleraciones:
- Derivamos nuevamente:
- $$ a_A + 2a_B = 0 $$