MOVIMIENTO PLANO RELATIVO DE UN DISCO: ECUACIONES ANALÍTICAS PARA RODAMIENTO
Paul R
Autor Principal • Engineering Vault
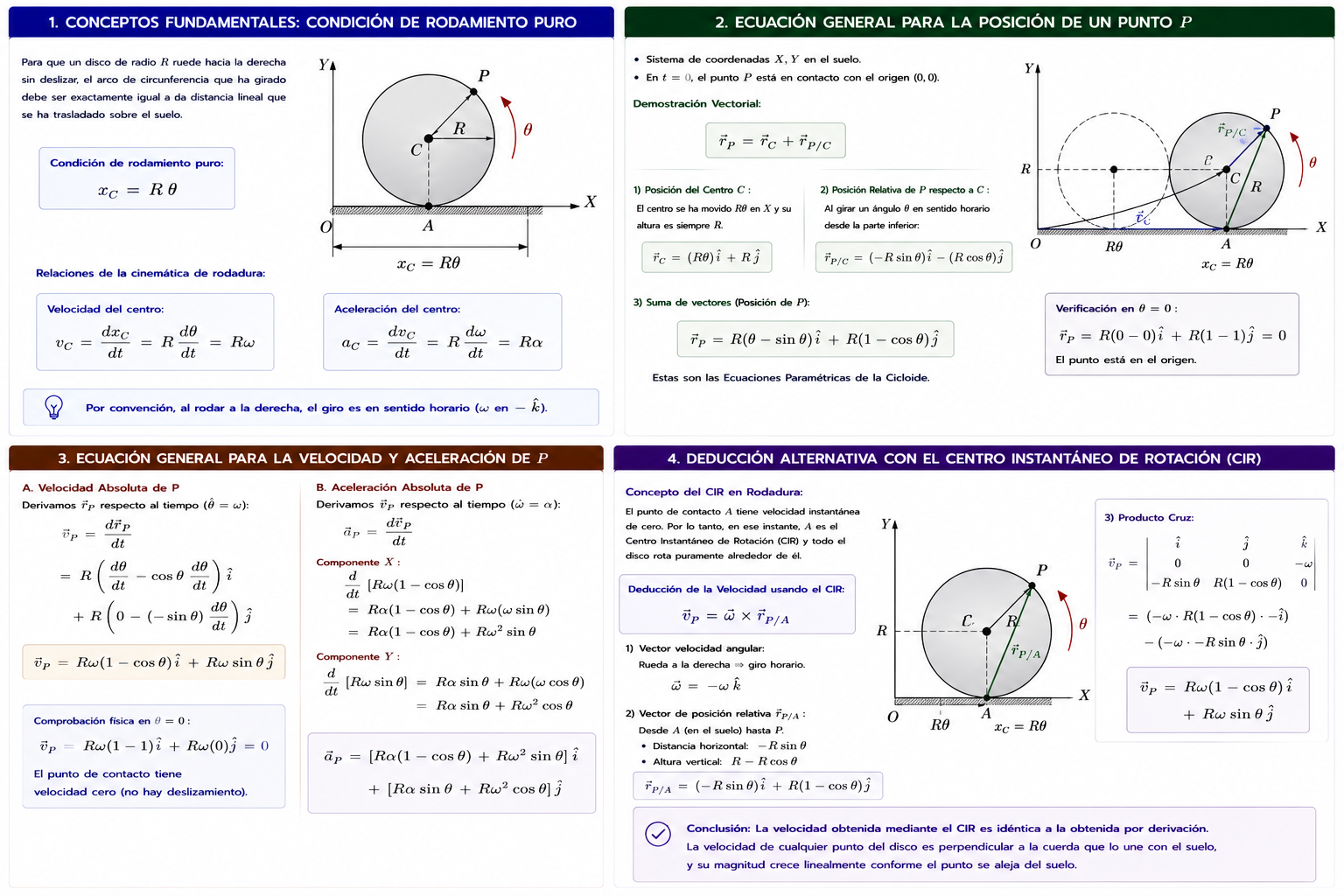
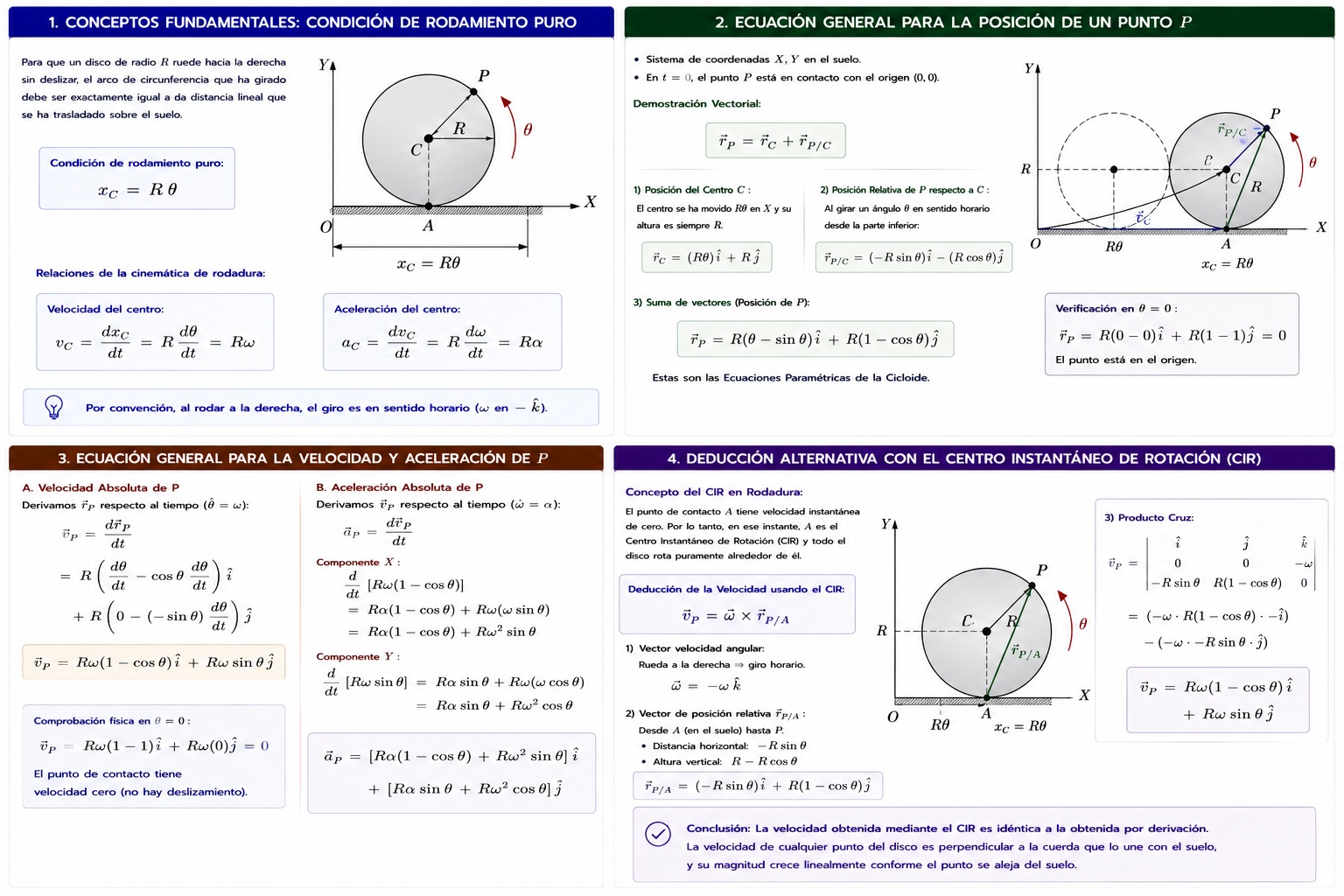
1. Conceptos Fundamentales: Condición de Rodamiento Puro
Para que un disco de radio $R$ ruede hacia la derecha sin deslizar (patinar), el arco de circunferencia que ha girado debe ser exactamente igual a la distancia lineal que se ha trasladado sobre el suelo.
Si el disco ha girado un ángulo $\theta$ (en radianes), la distancia trasladada por su centro de masa ($C$) es:
$$ x_C = R \cdot \theta $$
Derivando esta restricción geométrica respecto al tiempo, obtenemos las relaciones obligatorias de la cinemática de rodadura:
- Velocidad del Centro ($v_C$): $v_C = \frac{dx_C}{dt} = R \frac{d\theta}{dt} = R \omega$
- Aceleración del Centro ($a_C$): $a_C = \frac{dv_C}{dt} = R \frac{d\omega}{dt} = R \alpha$
(Donde $\omega$ es la velocidad angular y $\alpha$ la aceleración angular. Por convención, al rodar a la derecha, el giro es en sentido horario).
2. Ecuación General para la Posición de un Punto $P$
Establecemos un sistema de coordenadas cartesianas ($X, Y$) en el suelo.
En el instante $t = 0$, el punto $P$ de la periferia está en contacto exacto con el origen coordenado $(0,0)$.
A medida que el disco avanza hacia la derecha girando un ángulo $\theta$, queremos hallar el vector de posición absoluta $\vec{r}_P$.
Demostración Vectorial:
Utilizamos la ecuación de movimiento relativo:
$$ \vec{r}_P = \vec{r}_C + \vec{r}_{P/C} $$
- Posición del Centro ($C$): El centro se ha movido $R\theta$ en el eje $X$, y su altura en el eje $Y$ es siempre el radio $R$.
- $$ \vec{r}_C = (R \theta)\hat{i} + R\hat{j} $$
- Posición Relativa de $P$ respecto a $C$ ($\vec{r}_{P/C}$): Si observamos desde el centro $C$, el punto $P$ describe una circunferencia de radio $R$. Al girar un ángulo $\theta$ en sentido horario desde la parte inferior, las componentes trigonométricas del vector $\vec{r}_{P/C}$ son:
- En $X$: $-R \sin\theta$ (apunta hacia la izquierda del centro).
- En $Y$: $-R \cos\theta$ (apunta hacia abajo del centro).
- $$ \vec{r}_{P/C} = (-R \sin\theta)\hat{i} - (R \cos\theta)\hat{j} $$
Sumando ambos vectores, obtenemos las Ecuaciones Paramétricas de la Cicloide (Posición de $P$):
$$ \vec{r}_P = R(\theta - \sin\theta)\hat{i} + R(1 - \cos\theta)\hat{j} $$
3. Ecuación General para la Velocidad y Aceleración de $P$
A. Velocidad Absoluta de $P$:
La velocidad se obtiene derivando el vector de posición $\vec{r}_P$ respecto al tiempo. Aplicamos la regla de la cadena, sabiendo que $\frac{d\theta}{dt} = \omega$:
$$ \vec{v}_P = \frac{d\vec{r}_P}{dt} = R \left( \frac{d\theta}{dt} - \cos\theta \frac{d\theta}{dt} \right)\hat{i} + R \left( 0 - (-\sin\theta) \frac{d\theta}{dt} \right)\hat{j} $$
Factorizando $\omega = \dot{\theta}$:
$$ \vec{v}_P = R\omega(1 - \cos\theta)\hat{i} + R\omega(\sin\theta)\hat{j} $$
Comprobación física: Si evaluamos en $\theta = 0$ (el punto toca el suelo), $\cos(0)=1$ y $\sin(0)=0$. Esto nos da $\vec{v}_P = 0\hat{i} + 0\hat{j}$. ¡Demostramos matemáticamente que el punto de contacto con el suelo tiene velocidad cero!
B. Aceleración Absoluta de $P$:
Derivamos la ecuación de velocidad respecto al tiempo. Aquí utilizamos la regla del producto, ya que tanto $\omega$ como $\theta$ cambian en el tiempo ($\frac{d\omega}{dt} = \alpha$):
$$ \vec{a}_P = \frac{d\vec{v}_P}{dt} $$
- Componente X: $\frac{d}{dt}[R\omega(1 - \cos\theta)] = R\alpha(1 - \cos\theta) + R\omega(\omega \sin\theta) = R\alpha(1 - \cos\theta) + R\omega^2\sin\theta$
- Componente Y: $\frac{d}{dt}[R\omega\sin\theta] = R\alpha(\sin\theta) + R\omega(\omega \cos\theta) = R\alpha\sin\theta + R\omega^2\cos\theta$
Ecuación vectorial de aceleración:
$$ \vec{a}_P = [R\alpha(1 - \cos\theta) + R\omega^2\sin\theta]\hat{i} + [R\alpha\sin\theta + R\omega^2\cos\theta]\hat{j} $$
4. Deducción Alternativa con el Centro Instantáneo de Rotación (CIR)
El análisis vectorial anterior es riguroso, pero el método del CIR ofrece una visión mucho más elegante y directa, fundamental para los ingenieros mecánicos.
El Concepto del CIR en Rodadura:
Como demostramos en el punto 3A, la partícula de la periferia que entra en contacto con el suelo tiene una velocidad instantánea de cero. Por lo tanto, el punto de contacto $A$ funciona como el Centro Instantáneo de Rotación (CIR) en ese preciso milisegundo. Todo el disco está rotando puramente alrededor del punto de contacto $A$.
Deducción de la Velocidad usando el CIR:
Si el cuerpo rota puramente alrededor del CIR (Punto $A$), la velocidad de nuestro punto de estudio $P$ se calcula mediante un simple producto vectorial:
$$ \vec{v}_P = \vec{\omega} \times \vec{r}_{P/A} $$
- Vector Velocidad Angular: Como el disco rueda a la derecha, gira en sentido horario. En un plano $XY$, esto es el eje $Z$ negativo: $\vec{\omega} = -\omega\hat{k}$.
- Vector de Posición Relativa ($\vec{r}_{P/A}$): Este vector va desde el CIR ($A$) en el suelo, hasta el punto $P$. Analizando la geometría:
- La distancia horizontal desde $A$ (que está en $x = R\theta$) hasta $P$ (que está en $x = R\theta - R\sin\theta$) es $-R\sin\theta$.
- La altura vertical desde el suelo hasta $P$ es $y = R - R\cos\theta$.
- $$ \vec{r}_{P/A} = (-R\sin\theta)\hat{i} + R(1-\cos\theta)\hat{j} $$
- Producto Cruz:
- $$ \vec{v}_P = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 0 & 0 & -\omega \\ -R\sin\theta & R(1-\cos\theta) & 0 \end{vmatrix} $$
- $$ \vec{v}_P = (-\omega \cdot R(1-\cos\theta) \cdot -\hat{i}) - (-\omega \cdot -R\sin\theta \cdot \hat{j}) $$
- $$ \vec{v}_P = R\omega(1 - \cos\theta)\hat{i} + R\omega\sin\theta\hat{j} $$
Conclusión de la demostración: La ecuación de velocidad obtenida mediante el CIR es exactamente idéntica a la obtenida mediante derivadas relativas complejas. Esto demuestra la enorme utilidad del Centro Instantáneo de Rotación para el análisis de maquinarias: la velocidad de cualquier punto del disco es simplemente perpendicular a la línea recta (cuerda) que une ese punto con el suelo, y su magnitud crece linealmente conforme el punto se aleja del suelo.