MOMENTO DE UNA FUERZA COMO PRODUCTO VECTORIAL
Paul R
Autor Principal • Engineering Vault

En el análisis de estructuras tridimensionales o sistemas espaciales de fuerzas, el cálculo escalar del momento ($M = F \cdot d$) resulta insuficiente y geométricamente complejo, ya que hallar físicamente la distancia perpendicular exacta entre un punto y una línea de acción en el espacio 3D es matemáticamente tedioso.
Para solucionar esto, la mecánica vectorial redefine el Momento de una Fuerza utilizando la herramienta del producto vectorial (o producto cruz). A continuación, presento la investigación detallada de este enfoque.
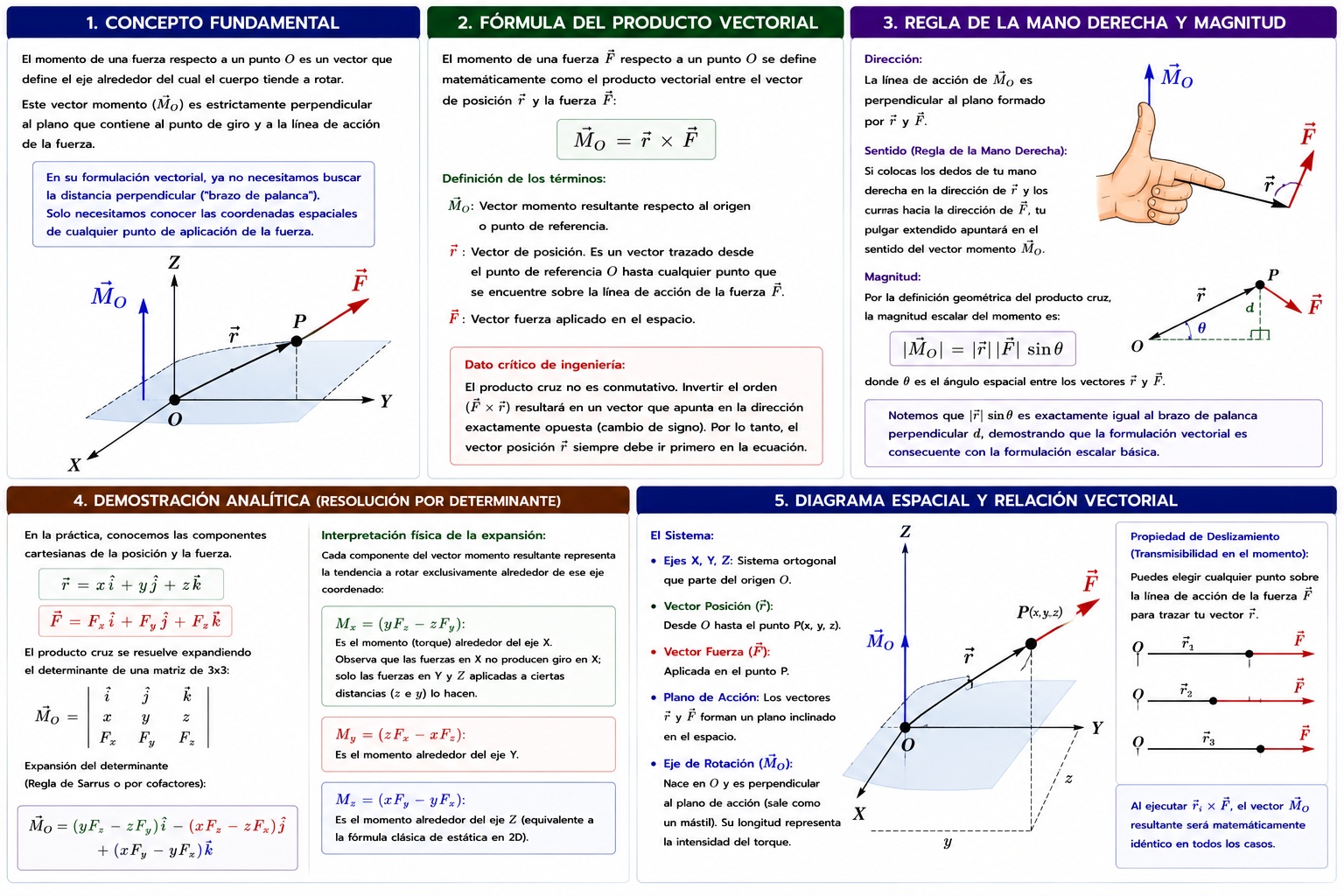
1. Concepto Fundamental
El momento de una fuerza respecto a un punto $O$ es un vector que define el eje alrededor del cual el cuerpo tiende a rotar. Este vector momento ($\vec{M}_O$) es estrictamente perpendicular al plano que contiene al punto de giro y a la línea de acción de la fuerza.
En su formulación vectorial, ya no necesitamos buscar la distancia perpendicular ("brazo de palanca"). Solo necesitamos conocer las coordenadas espaciales de cualquier punto de aplicación de la fuerza.
2. Fórmula del Producto Vectorial
El momento de una fuerza $\vec{F}$ respecto a un punto $O$ se define matemáticamente como el producto vectorial entre el vector de posición $\vec{r}$ y la fuerza $\vec{F}$:
$$ \vec{M}_O = \vec{r} \times \vec{F} $$
Definición de los términos:
- $\vec{M}_O$: Vector momento resultante respecto al origen o punto de referencia.
- $\vec{r}$: Vector de posición. Es un vector trazado desde el punto de referencia $O$ hasta cualquier punto que se encuentre sobre la línea de acción de la fuerza $\vec{F}$.
- $\vec{F}$: Vector fuerza aplicado en el espacio.
Dato crítico de ingeniería: El producto cruz no es conmutativo. Invertir el orden ($\vec{F} \times \vec{r}$) resultará en un vector que apunta en la dirección exactamente opuesta (cambio de signo), lo cual representaría una rotación contraria a la física real del problema. Por lo tanto, el vector posición $\vec{r}$ siempre debe ir primero en la ecuación.
3. Regla de la Mano Derecha y Magnitud
La operación $\vec{r} \times \vec{F}$ genera un nuevo vector.
- Dirección: La línea de acción de $\vec{M}_O$ es perpendicular al plano formado por $\vec{r}$ y $\vec{F}$.
- Sentido: Se determina usando la regla de la mano derecha. Si colocas los dedos de tu mano derecha en la dirección de $\vec{r}$ y los curras hacia la dirección de $\vec{F}$, tu pulgar extendido apuntará en el sentido del vector momento $\vec{M}_O$.
- Magnitud: Por la definición geométrica del producto cruz, la magnitud escalar del momento es:
- $$ |\vec{M}_O| = |\vec{r}| |\vec{F}| \sin\theta $$
- (Donde $\theta$ es el ángulo espacial entre los vectores $\vec{r}$ y $\vec{F}$. Notemos que $|\vec{r}| \sin\theta$ es exactamente igual al brazo de palanca perpendicular $d$, demostrando que la formulación vectorial es consecuente con la formulación escalar básica).
4. Demostración Analítica (Resolución por Determinante)
En la práctica, conocemos las componentes cartesianas de la posición y la fuerza.
$$ \vec{r} = x\hat{i} + y\hat{j} + z\hat{k} $$
$$ \vec{F} = F_x\hat{i} + F_y\hat{j} + F_z\hat{k} $$
El producto cruz se resuelve expandiendo el determinante de una matriz de 3x3:
$$ \vec{M}_O = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ x & y & z \\ F_x & F_y & F_z \end{vmatrix} $$
Expansión del determinante (Regla de Sarrus o por cofactores):
$$ \vec{M}_O = (y F_z - z F_y)\hat{i} - (x F_z - z F_x)\hat{j} + (x F_y - y F_x)\hat{k} $$
Interpretación física de la expansión:
Cada componente del vector momento resultante representa la tendencia a rotar exclusivamente alrededor de ese eje coordenado:
- $M_x = (y F_z - z F_y)$: Es el momento (torque) alrededor del eje X. Observa que las fuerzas en X no producen giro en X; solo las fuerzas en Y y Z aplicadas a ciertas distancias (z e y) lo hacen.
- $M_y = (z F_x - x F_z)$: Es el momento alrededor del eje Y.
- $M_z = (x F_y - y F_x)$: Es el momento alrededor del eje Z (equivalente a la fórmula clásica de estática en 2D).
5. Diagrama Espacial y Relación Vectorial
Para visualizar esta relación tridimensional, imagina el siguiente esquema coordenado:
- El Sistema: Dibuja los tres ejes ortogonales ($X$, $Y$, $Z$) partiendo de un punto de origen $O$.
- Vector Posición ($\vec{r}$): Trazamos una flecha desde el origen $O$ hasta un punto en el espacio $P(x,y,z)$.
- Vector Fuerza ($\vec{F}$): En el punto $P$, aplicamos una fuerza $\vec{F}$ orientada en el espacio.
- El Plano de Acción: Los vectores $\vec{r}$ y $\vec{F}$ forman juntos una "hoja" o plano inclinado en el espacio tridimensional.
- El Eje de Rotación ($\vec{M}_O$): El vector momento nace en el origen $O$ y sale disparado como un mástil a 90 grados exactos respecto a esa hoja o plano. La longitud de este mástil representa la intensidad del torque.
Propiedad de Deslizamiento (Transmisibilidad en el momento):
La belleza del cálculo vectorial es que puedes elegir cualquier punto sobre la línea de acción de la fuerza para trazar tu vector $\vec{r}$. Supongamos que la fuerza actúa a lo largo de una cuerda. Puedes calcular el vector $\vec{r}$ hasta el inicio de la cuerda, hasta el medio o hasta el final; al ejecutar el producto cruz $\vec{r} \times \vec{F}$, el vector $\vec{M}_O$ resultante será matemáticamente idéntico en todos los casos.