Mecánica Vectorial: Análisis del Momento de un Par y Sistemas Equivalentes Fuerza-Par
Paul R
Autor Principal • Engineering Vault
El análisis de cuerpos rígidos se complica cuando las fuerzas aplicadas no concurren en un solo punto. Para entender cómo estas fuerzas generan torsión pura o cómo podemos simplificar sistemas complejos sin alterar su efecto físico, recurrimos a dos conceptos fundamentales: el Par de Fuerzas y el Sistema Equivalente Fuerza-Par.
A continuación, presento la investigación detallada, sus demostraciones matemáticas y la interpretación física.
1. El Par de Fuerzas (Concepto Fundamental)
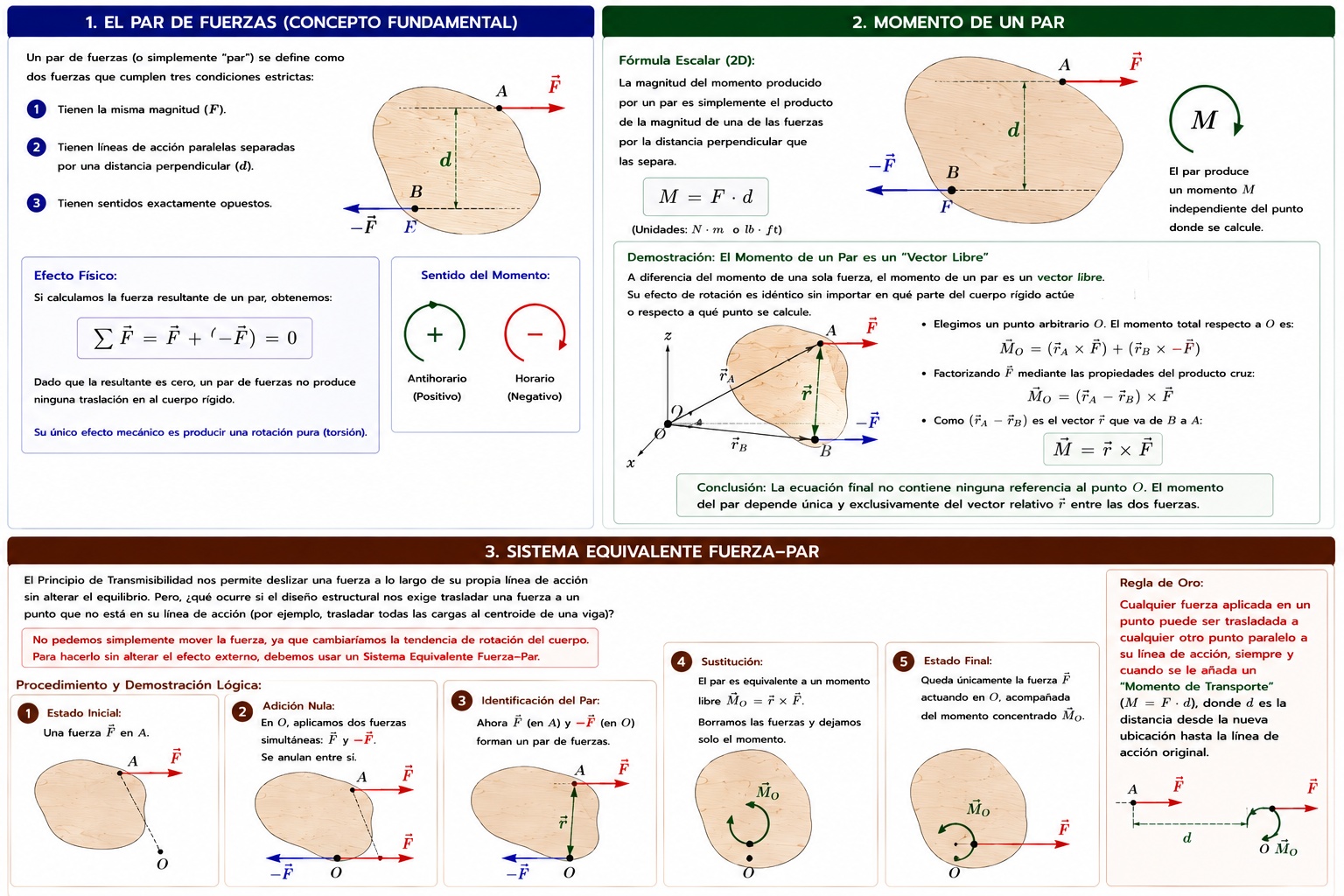
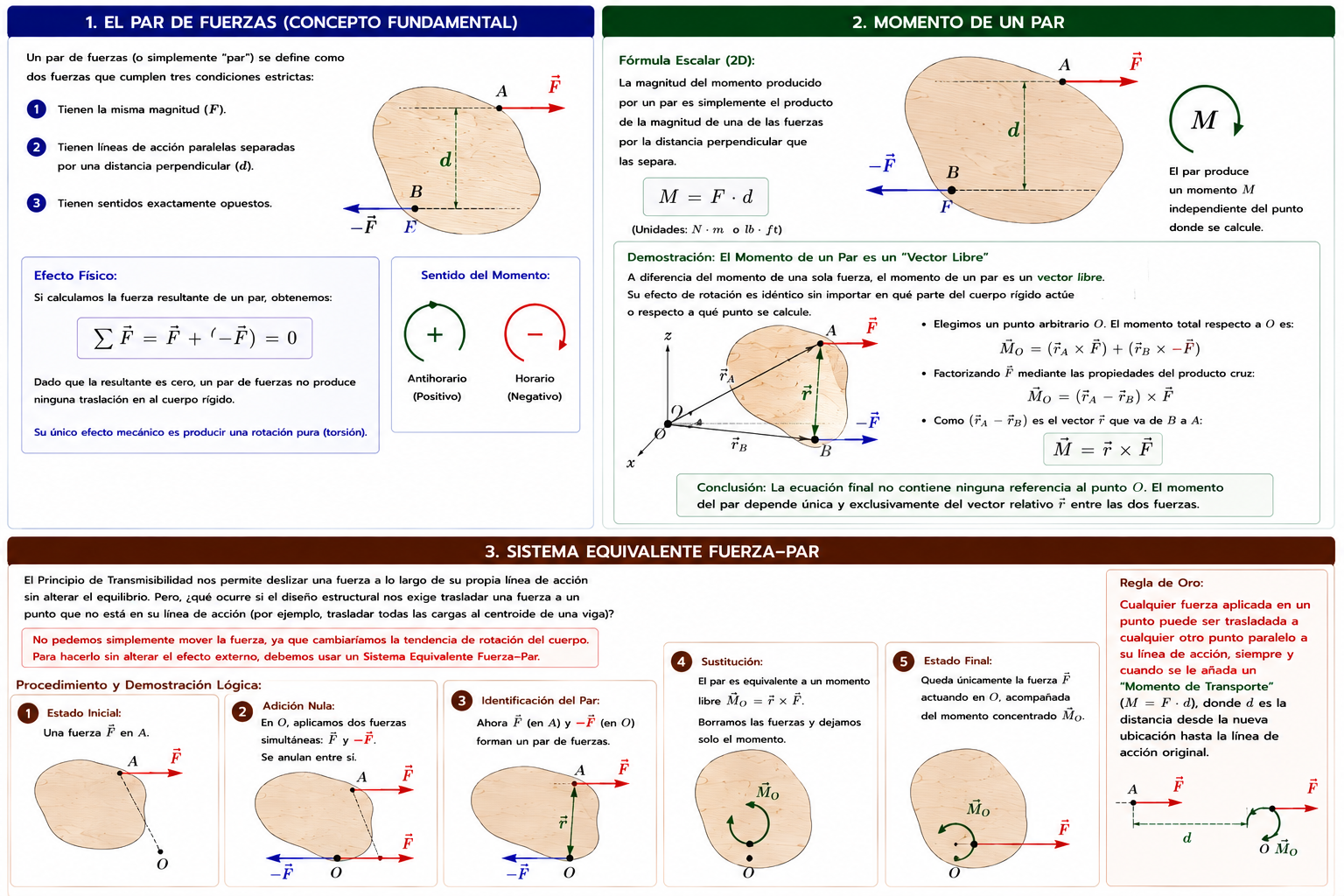
Un par de fuerzas (o simplemente "par") se define como dos fuerzas que cumplen tres condiciones estrictas:
- Tienen la misma magnitud ($F$).
- Tienen líneas de acción paralelas separadas por una distancia perpendicular ($d$).
- Tienen sentidos exactamente opuestos.
Efecto Físico:
Si calculamos la fuerza resultante de un par, obtenemos:
$$ \sum \vec{F} = \vec{F} + (-\vec{F}) = 0 $$
Dado que la resultante es cero, un par de fuerzas no produce ninguna traslación en el cuerpo rígido. Su único efecto mecánico es producir una rotación pura (torsión).
2. Momento de un Par
El efecto de rotación que produce un par de fuerzas se cuantifica mediante el "Momento de un Par".
Fórmula Escalar (2D):
La magnitud del momento producido por un par es simplemente el producto de la magnitud de una de las fuerzas por la distancia perpendicular que las separa.
$$ M = F \cdot d $$
(El sentido se define por la regla de la mano derecha o por simple inspección visual: horario o antihorario).
Demostración: El Momento de un Par es un "Vector Libre"
A diferencia del momento de una sola fuerza (que siempre se calcula respecto a un punto de pivote específico), el momento de un par es un vector libre. Esto significa que su efecto de rotación es idéntico sin importar en qué parte del cuerpo rígido actúe o respecto a qué punto se calcule.
Demostración Vectorial:
Imaginemos dos fuerzas, $\vec{F}$ aplicada en el punto $A$ y $-\vec{F}$ aplicada en el punto $B$.
Elegimos un punto de referencia totalmente arbitrario $O$ en el espacio.
El momento total respecto a $O$ es la suma de los momentos de ambas fuerzas:
$$ \vec{M}_O = (\vec{r}_A \times \vec{F}) + (\vec{r}_B \times -\vec{F}) $$
Factorizando la fuerza $\vec{F}$ mediante las propiedades del producto cruz:
$$ \vec{M}_O = (\vec{r}_A - \vec{r}_B) \times \vec{F} $$
Por la suma geométrica de vectores, la diferencia $(\vec{r}_A - \vec{r}_B)$ es igual al vector $\vec{r}$, que va directamente desde el punto $B$ hasta el punto $A$.
$$ \vec{M} = \vec{r} \times \vec{F} $$
Conclusión: La ecuación final no contiene ninguna referencia al punto $O$. El momento del par depende única y exclusivamente del vector relativo $\vec{r}$ entre las dos fuerzas. Por lo tanto, el momento de un par es el mismo respecto a cualquier punto del universo.
3. Sistema Equivalente Fuerza-Par
El Principio de Transmisibilidad nos permite deslizar una fuerza a lo largo de su propia línea de acción sin alterar el equilibrio. Pero, ¿qué ocurre si el diseño estructural nos exige trasladar una fuerza a un punto que no está en su línea de acción (por ejemplo, trasladar todas las cargas al centroide de una viga)?
No podemos simplemente mover la fuerza, ya que cambiaríamos la tendencia de rotación del cuerpo. Para hacerlo sin alterar el efecto externo, debemos usar un Sistema Equivalente Fuerza-Par.
Procedimiento y Demostración Lógica:
Supongamos que tenemos una fuerza $\vec{F}$ actuando en el punto $A$ y queremos trasladarla al punto $O$.
- Estado Inicial: Una fuerza $\vec{F}$ en $A$.
- Adición Nula: En el punto de destino $O$, aplicamos dos fuerzas simultáneas: $\vec{F}$ y $-\vec{F}$. Como se anulan entre sí, no hemos alterado mecánicamente el sistema.
- Identificación del Par: Ahora observa el sistema. Tienes la fuerza original $\vec{F}$ en $A$ y la nueva fuerza $-\vec{F}$ en $O$. Estas dos fuerzas forman exactamente un par de fuerzas.
- Sustitución: Sabemos que ese par produce un momento de torsión pura equivalente a $\vec{M} = \vec{r} \times \vec{F}$ (donde $\vec{r}$ va de $O$ a $A$). Podemos borrar esas dos fuerzas y reemplazarlas por el vector momento libre $\vec{M}_O$.
- Estado Final: Nos queda únicamente la fuerza $\vec{F}$ actuando en $O$, acompañada de un momento concentrado $\vec{M}_O$.
Regla de Oro:
Cualquier fuerza aplicada en un punto puede ser trasladada a cualquier otro punto paralelo a su línea de acción, siempre y cuando se le añada un "Momento de Transporte" ($M = F \cdot d$), donde $d$ es la distancia desde la nueva ubicación hasta la línea de acción original.