Mecánica Analítica Aplicada: Dinámica del Sólido Rígido Bidimensional mediante Euler-Lagrange
Paul R
Autor Principal • Engineering Vault
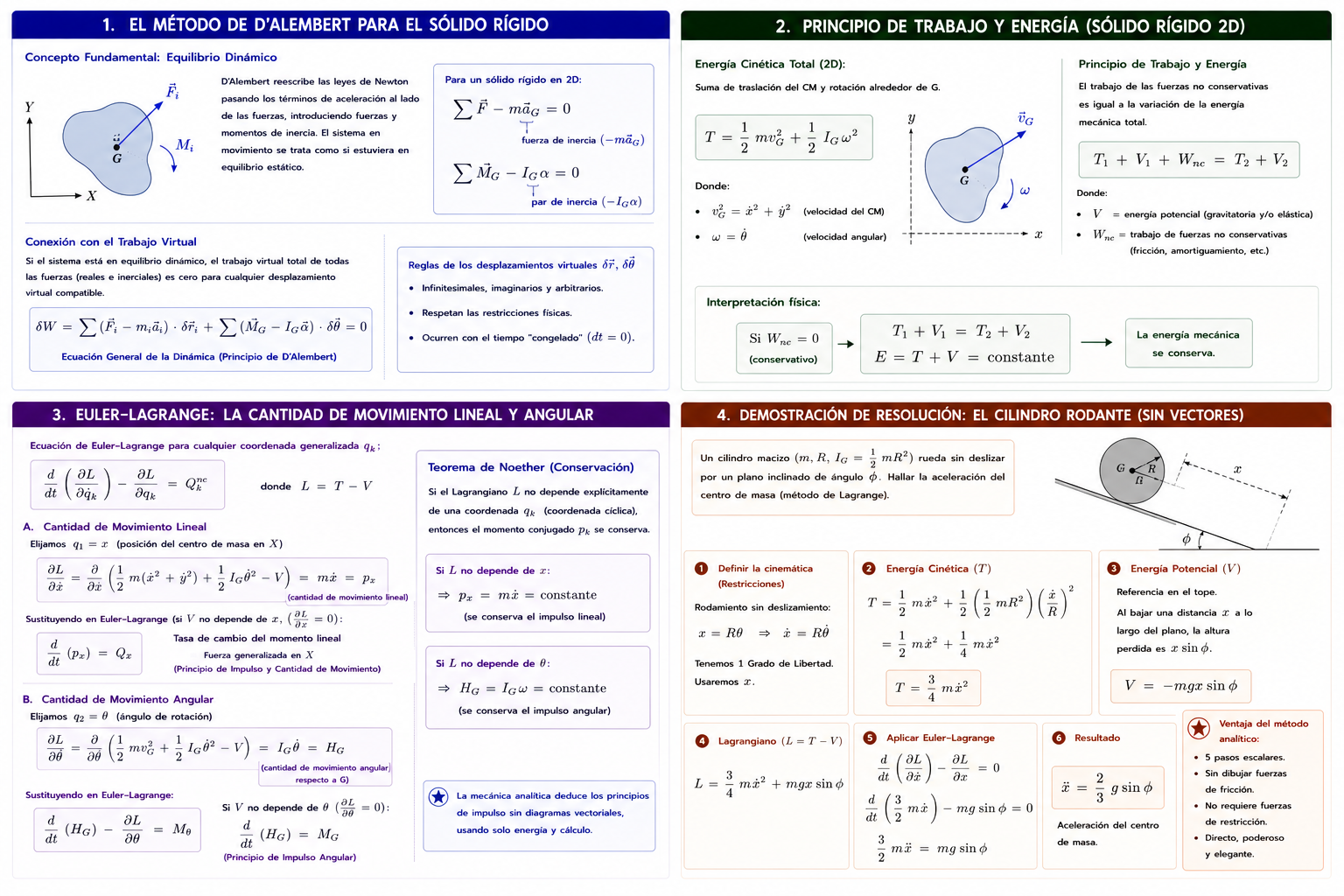
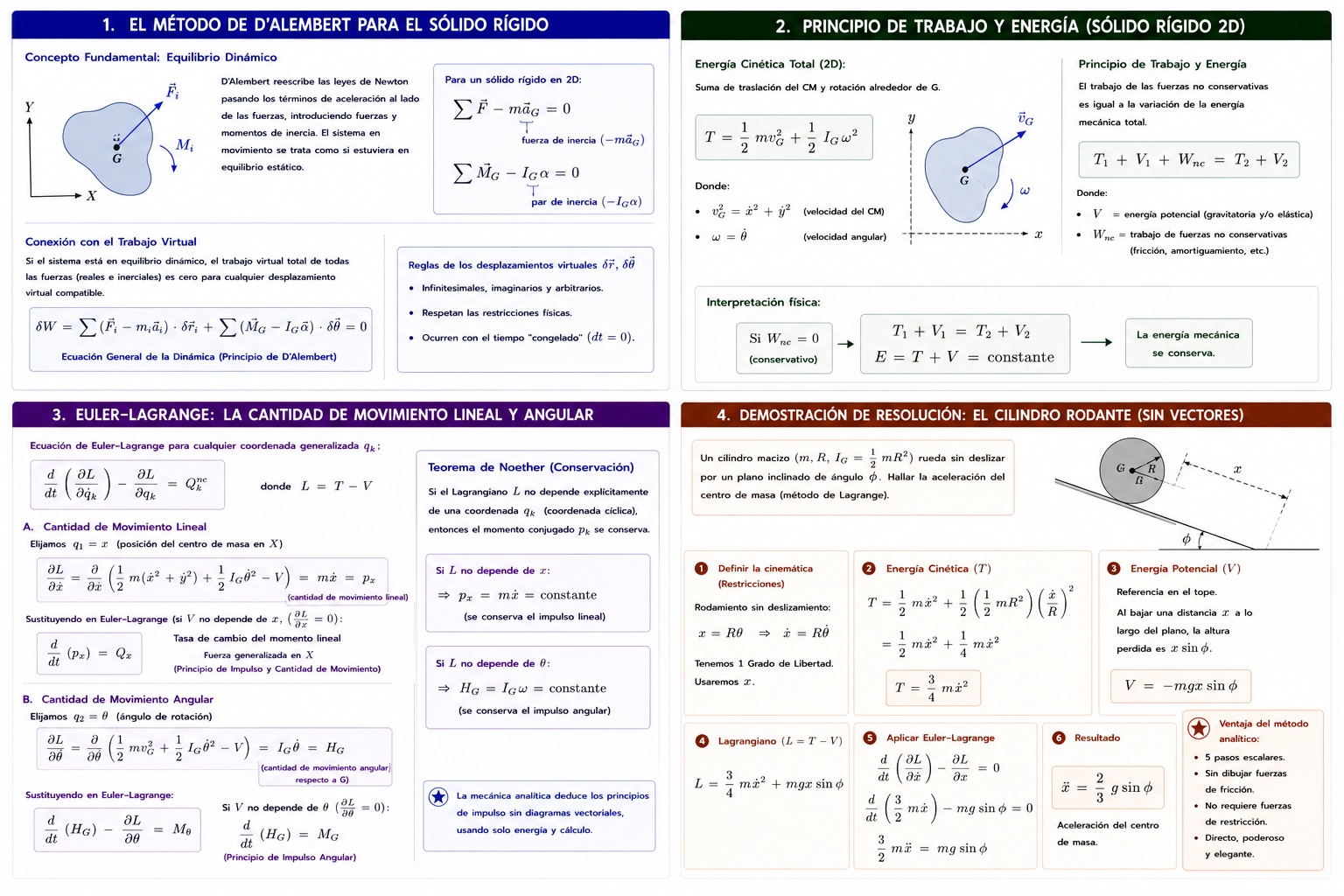
1. El Método de D'Alembert para el Sólido Rígido
Jean le Rond d'Alembert proporcionó el puente conceptual entre la estática y la dinámica, sentando las bases para los métodos de la energía.
Concepto Fundamental (Equilibrio Dinámico):
D'Alembert propuso reescribir las leyes de Newton pasando los términos de aceleración al lado de las fuerzas. Al hacerlo, introdujo fuerzas y momentos "ficticios" o inerciales.
Para un sólido rígido en movimiento plano (2D):
$$ \sum \vec{F} - m\vec{a}_G = 0 $$
$$ \sum \vec{M}_G - I_G \alpha = 0 $$
El término $(-m\vec{a}_G)$ actúa como una fuerza de inercia, y $(-I_G \alpha)$ actúa como un par de inercia. El sistema en movimiento ahora puede tratarse matemáticamente como si estuviera en equilibrio estático.
Conexión con el Trabajo Virtual:
Si el sistema está en este "equilibrio dinámico", el trabajo virtual ($\delta W$) realizado por todas las fuerzas (reales e inerciales) durante un desplazamiento virtual compatible debe ser cero:
$$ \delta W = \sum (\vec{F}_i - m\vec{a}_i) \cdot \delta\vec{r}_i + \sum (\vec{M}_G - I_G \vec{\alpha}) \cdot \delta\vec{\theta} = 0 $$
Esta es la Ecuación General de la Dinámica, de la cual se deriva toda la mecánica analítica.
2. Principio de Trabajo y Energía (Sólido Rígido 2D)
Al integrar la ecuación del principio de D'Alembert a lo largo de una trayectoria real, obtenemos el Principio de Trabajo y Energía.
Para un sólido rígido, la Energía Cinética Total ($T$) se define por sus dos coordenadas generalizadas en 2D (traslación del Centro de Masa $G$ y rotación alrededor de $G$):
$$ T = \frac{1}{2} m v_G^2 + \frac{1}{2} I_G \omega^2 $$
(En coordenadas cartesianas: $v_G^2 = \dot{x}^2 + \dot{y}^2$ y $\omega = \dot{\theta}$).
El principio escalar de conservación establece que el Trabajo de las fuerzas no conservativas ($W_{nc}$) es igual a la variación de la Energía Mecánica Total (Lagrangiana o Hamiltoniana):
$$ T_1 + V_1 + W_{nc} = T_2 + V_2 $$
(Donde $V$ es la Energía Potencial gravitatoria y/o elástica).
3. Euler-Lagrange: La Cantidad de Movimiento Lineal y Angular
Aquí es donde la mecánica analítica revela su poder. Las Ecuaciones de Euler-Lagrange nos permiten deducir los principios de Impulso y Cantidad de Movimiento sin recurrir a diagramas vectoriales, utilizando únicamente el Lagrangiano ($L = T - V$).
La ecuación de Euler-Lagrange para cualquier coordenada generalizada $q_k$ es:
$$ \frac{d}{dt} \left( \frac{\partial L}{\partial \dot{q}_k} \right) - \frac{\partial L}{\partial q_k} = Q_k^{nc} $$
A. Demostración de la Cantidad de Movimiento Lineal
Elijamos como coordenada generalizada la posición del centro de masa en el eje $X$ ($q_1 = x$).
- Derivamos $L$ respecto a la velocidad lineal $\dot{x}$:
- $$ \frac{\partial L}{\partial \dot{x}} = \frac{\partial}{\partial \dot{x}} \left( \frac{1}{2} m (\dot{x}^2 + \dot{y}^2) + \frac{1}{2} I_G \dot{\theta}^2 - V \right) = m\dot{x} $$
¡Magia matemática! La derivada del Lagrangiano respecto a la velocidad lineal es exactamente la Cantidad de Movimiento Lineal ($p_x = mv_x$).
- Sustituimos en la ecuación de Euler-Lagrange (asumiendo que $V$ no depende de $x$, por lo que $\partial L / \partial x = 0$):
- $$ \frac{d}{dt} (p_x) = Q_x $$
- Esto demuestra la segunda ley fundamental: La tasa de cambio temporal de la cantidad de movimiento lineal es igual a la fuerza generalizada (el Principio de Impulso y Cantidad de Movimiento).
B. Demostración de la Cantidad de Movimiento Angular
Elijamos como coordenada generalizada el ángulo de rotación ($q_2 = \theta$).
- Derivamos $L$ respecto a la velocidad angular $\dot{\theta}$ (o $\omega$):
- $$ \frac{\partial L}{\partial \dot{\theta}} = \frac{\partial}{\partial \dot{\theta}} \left( \frac{1}{2} m v_G^2 + \frac{1}{2} I_G \dot{\theta}^2 - V \right) = I_G \dot{\theta} $$
La derivada del Lagrangiano respecto a la velocidad angular es exactamente la Cantidad de Movimiento Angular centroidal ($H_G = I_G \omega$).
- Sustituimos en la ecuación de Euler-Lagrange:
- $$ \frac{d}{dt} (H_G) - \frac{\partial L}{\partial \theta} = M_{\theta} $$
- Si la energía potencial no depende del ángulo ($\partial V / \partial \theta = 0$), obtenemos que la derivada del momento angular es igual al torque aplicado $\frac{d}{dt}(H_G) = M_G$.
El Teorema de Noether (Conservación):
Las ecuaciones anteriores demuestran una regla analítica brutal: Si el Lagrangiano de un sistema no contiene explícitamente una coordenada $q_k$ (coordenada cíclica o ignorable), entonces el momento conjugado $p_k$ se conserva estrictamente a lo largo del tiempo.
Si $L$ no depende de $x$, se conserva el impulso lineal. Si $L$ no depende de $\theta$, se conserva el impulso angular.
4. Demostración de Resolución: El Cilindro Rodante (Sin vectores)
Para comprobar la superioridad del método analítico sobre el vectorial, resolvamos el clásico problema de un cilindro macizo (masa $m$, radio $R$, $I_G = \frac{1}{2}mR^2$) rodando sin deslizar por un plano inclinado de ángulo $\phi$.
En Newton-Euler, tendrías que dibujar la fricción, la normal, el peso, crear tres ecuaciones (una de ellas $M_G = F_f R$) y resolver el sistema acoplado. En Lagrange, el proceso es directo y escalar.
- Definir la cinemática (Restricciones):
- Si rueda sin deslizar, el desplazamiento lineal del centro ($x$) y la rotación ($\theta$) están acoplados: $x = R\theta \implies \dot{x} = R\dot{\theta}$.
- Tenemos solo 1 Grado de Libertad. Usaremos $x$.
- Energía Cinética ($T$):
- $$ T = \frac{1}{2} m \dot{x}^2 + \frac{1}{2} \left( \frac{1}{2} m R^2 \right) \left( \frac{\dot{x}}{R} \right)^2 $$
- $$ T = \frac{1}{2} m \dot{x}^2 + \frac{1}{4} m \dot{x}^2 = \frac{3}{4} m \dot{x}^2 $$
- Energía Potencial ($V$):
- Fijamos la referencia en el tope. Al bajar una distancia $x$ a lo largo del plano, la altura perdida es $x \sin\phi$.
- $$ V = -mgx \sin\phi $$
- El Lagrangiano ($L = T - V$):
- $$ L = \frac{3}{4} m \dot{x}^2 + mgx \sin\phi $$
- Aplicar Euler-Lagrange:
- $$ \frac{d}{dt} \left( \frac{\partial L}{\partial \dot{x}} \right) - \frac{\partial L}{\partial x} = 0 $$
- $$ \frac{d}{dt} \left( \frac{3}{2} m \dot{x} \right) - mg \sin\phi = 0 $$
- $$ \frac{3}{2} m \ddot{x} = mg \sin\phi $$
- $$ \ddot{x} = \frac{2}{3} g \sin\phi $$