Grados de libertad en estructuras: Cómo analizar la conectividad nodal en modelos complejos.
Paul R
Autor Principal • Engineering Vault
La ingeniería estructural moderna depende profundamente del análisis matricial y del cálculo computacional. Los métodos tradicionales manuales resultan insuficientes cuando se estudian estructuras hiperestáticas, edificios de múltiples niveles, puentes o modelos tridimensionales complejos.
En este contexto, los Grados de Libertad (GDL) constituyen la base matemática y cinemática sobre la cual se construye todo el análisis estructural computacional. Antes de ensamblar matrices de rigidez, calcular deformaciones o programar algoritmos en Python, el ingeniero debe comprender exactamente cómo puede moverse una estructura.
Un error en la identificación de los grados de libertad provoca matrices mal ensambladas, inestabilidad numérica y resultados estructurales completamente erróneos.
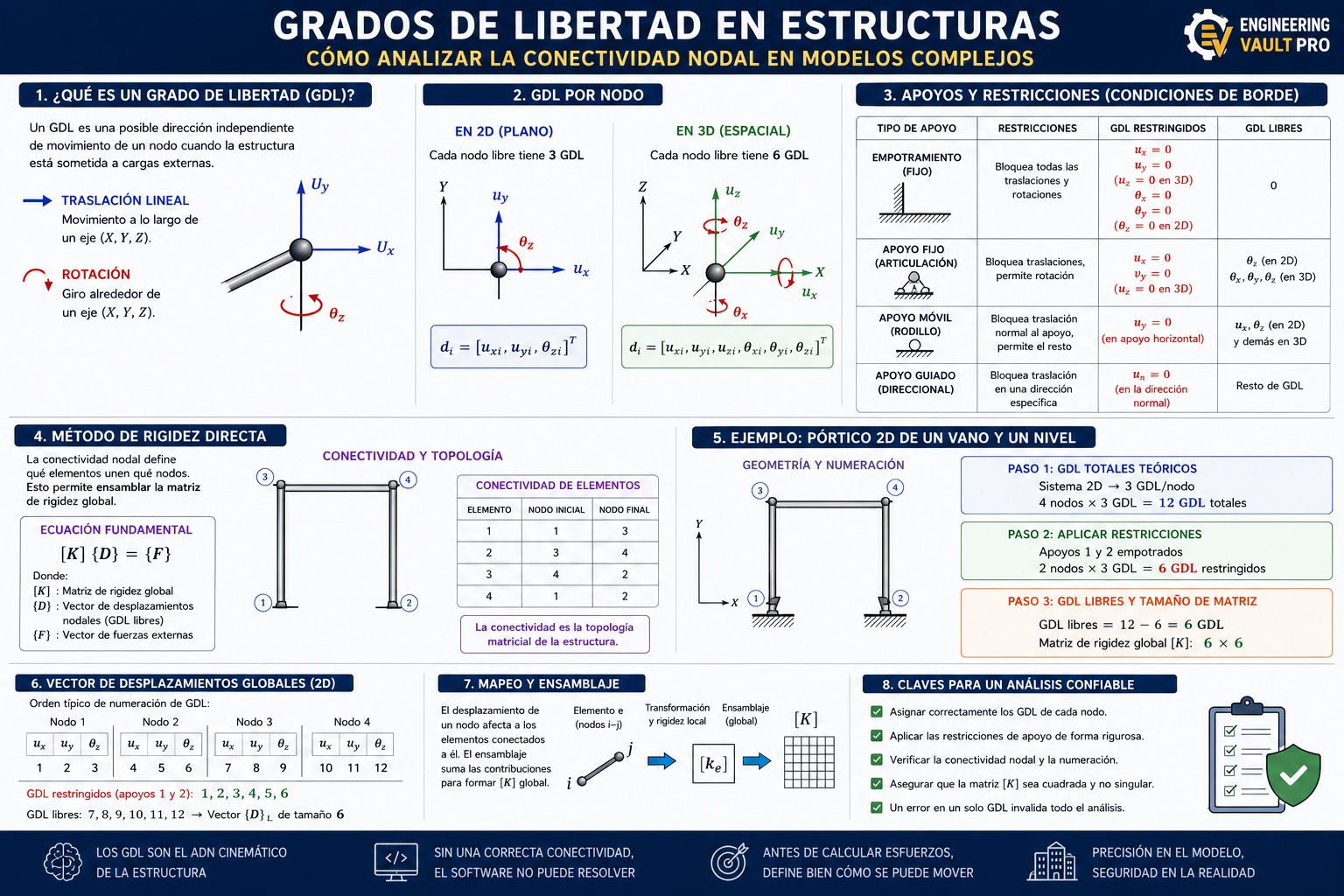
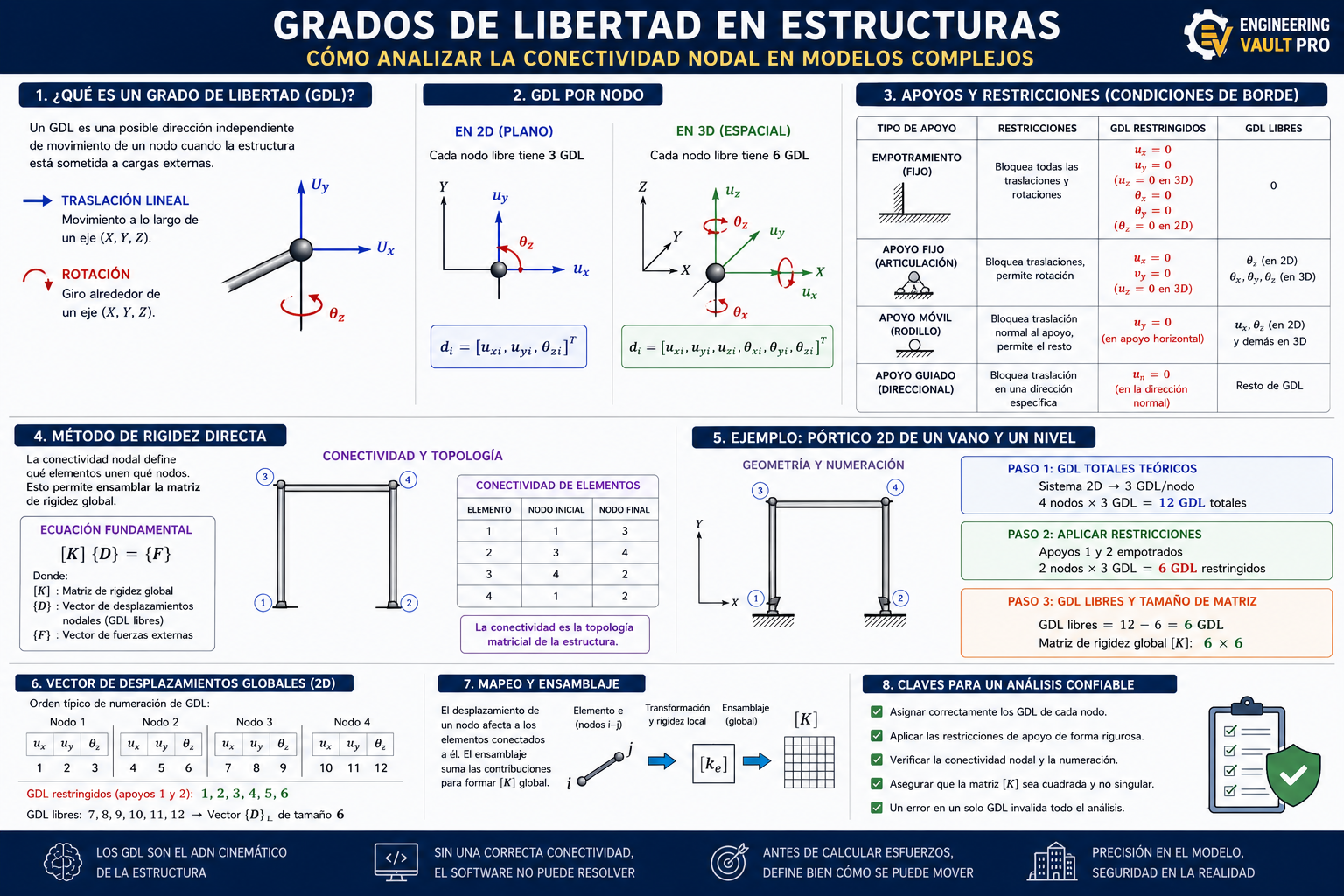
¿Qué son los Grados de Libertad?
Un grado de libertad representa un movimiento independiente que puede experimentar un nodo dentro de una estructura. Estos movimientos pueden ser:
- Traslaciones lineales.
- Rotaciones angulares.
En términos físicos, los grados de libertad describen todas las formas posibles en las que una estructura puede deformarse cuando actúan fuerzas externas.
Grados de Libertad en un Nodo 2D
En un sistema bidimensional plano, cada nodo libre posee tres movimientos posibles:
- Traslación horizontal en el eje $X$.
- Traslación vertical en el eje $Y$.
- Rotación alrededor del eje $Z$.
El vector cinemático nodal se expresa como:
$$d_i = \begin{bmatrix} u_{xi} \\ u_{yi} \\ \theta_{zi} \end{bmatrix}$$
Donde:
- $u_{xi}$ = desplazamiento horizontal.
- $u_{yi}$ = desplazamiento vertical.
- $\theta_{zi}$ = rotación nodal.
Por lo tanto:
$$GDL_{2D}=3 \text{ por nodo}$$
Grados de Libertad en un Nodo 3D
Cuando se analiza una estructura espacial tridimensional, la complejidad aumenta significativamente. Cada nodo posee seis grados de libertad:
Traslaciones:
- Eje $X$
- Eje $Y$
- Eje $Z$
Rotaciones:
- Alrededor de $X$
- Alrededor de $Y$
- Alrededor de $Z$
El vector nodal tridimensional queda definido como:
$$d_i = \begin{bmatrix} u_x \\ u_y \\ u_z \\ \theta_x \\ \theta_y \\ \theta_z \end{bmatrix}$$
Por consiguiente:
$$GDL_{3D}=6 \text{ por nodo}$$
Esto provoca que las matrices globales crezcan rápidamente en tamaño y complejidad computacional.
Restricciones y Condiciones de Apoyo
Los apoyos estructurales funcionan como restricciones cinemáticas que eliminan movimientos posibles. La cantidad de grados de libertad libres depende directamente del tipo de apoyo utilizado.
Apoyo Empotrado
Un empotramiento bloquea completamente todos los movimientos:
$$u_x = 0$$
$$u_y = 0$$
$$\theta_z = 0$$
Por lo tanto:
$$GDL_{libres}=0$$
(Restringe 3 GDL en 2D)
Apoyo Articulado
Una articulación permite la rotación, pero restringe las traslaciones:
$$u_x = 0$$
$$u_y = 0$$
$$\theta_z \neq 0$$
En consecuencia:
$$GDL_{libres}=1$$
(Restringe 2 GDL en 2D)
Apoyo Rodillo
Un rodillo restringe únicamente una dirección. Por ejemplo:
$$u_y = 0$$
pero:
$$u_x \neq 0$$
$$\theta_z \neq 0$$
(Restringe 1 GDL en 2D)
Cálculo General de los Grados de Libertad
La cantidad total de grados de libertad libres se calcula mediante:
$$GDL_L = GDL_T - GDL_R$$
Donde:
- $GDL_L$ = grados de libertad libres.
- $GDL_T$ = grados de libertad totales.
- $GDL_R$ = grados de libertad restringidos.
Conectividad Nodal y Matriz de Rigidez
La conectividad nodal define cómo se unen los elementos dentro de la estructura (un nodo inicial y un nodo final). Esta información es esencial para ensamblar la matriz de rigidez global $[K]$.
Toda la formulación matricial estructural se basa en la ecuación:
$$[K]\{D\}=\{F\}$$
Donde:
- $[K]$ es la matriz de rigidez global.
- $\{D\}$ es el vector de desplazamientos nodales.
- $\{F\}$ es el vector de fuerzas externas.
Significado Físico: Cada término de la matriz representa la fuerza necesaria para producir un desplazamiento unitario en un determinado grado de libertad. La matriz global siempre será cuadrada: $[K]_{n \times n}$, donde $n$ es el número total de GDL libres.
Ejemplo: Pórtico Plano de un Nivel
Consideremos un pórtico bidimensional simple formado por 4 nodos, 3 elementos estructurales y 2 apoyos empotrados.
- Paso 1: Calcular GDL Totales. Cada nodo posee 3 GDL.
- $$GDL_T = 4 \times 3 = 12$$
- Paso 2: Aplicar Restricciones. Los dos apoyos empotrados restringen $2 \times 3 = 6$ GDL.
- $$GDL_R = 6$$
- Paso 3: Obtener GDL Libres.
- $$GDL_L = 12 - 6 = 6$$
Tamaño de la Matriz Global: La matriz estructural será $[K]_{6 \times 6}$ porque existen seis desplazamientos incógnitos.
Numeración de los GDL
La numeración correcta es fundamental para evitar errores de ensamblaje:
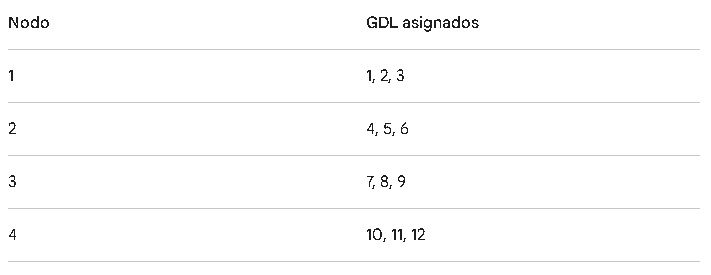
Una numeración incorrecta produce incompatibilidad matricial y errores de conectividad. Además, si existen movimientos rígidos no restringidos, la matriz se vuelve singular ($\det(K)=0$), lo que indica que la estructura es un mecanismo inestable.
Importancia en Programación Estructural y Elementos Finitos (FEM)
El Método de Elementos Finitos (FEM) utiliza exactamente los mismos principios. Cuando se desarrollan algoritmos (Python, MATLAB, C++) o se usan softwares como ETABS, SAP2000 o ANSYS, el ingeniero debe definir nodos, asignar conectividades, numerar GDL, aplicar restricciones y ensamblar matrices.
Conclusión
Los grados de libertad representan el núcleo cinemático de toda estructura. Comprender cómo se desplazan los nodos, cómo se conectan y cómo se ensamblan las matrices constituye el fundamento absoluto del análisis estructural moderno, garantizando la precisión del cálculo y la seguridad de la obra.