EQUILIBRIO: Momentos sobre un Cuerpo Rígido y Leyes de Newton
Paul R
Autor Principal • Engineering Vault

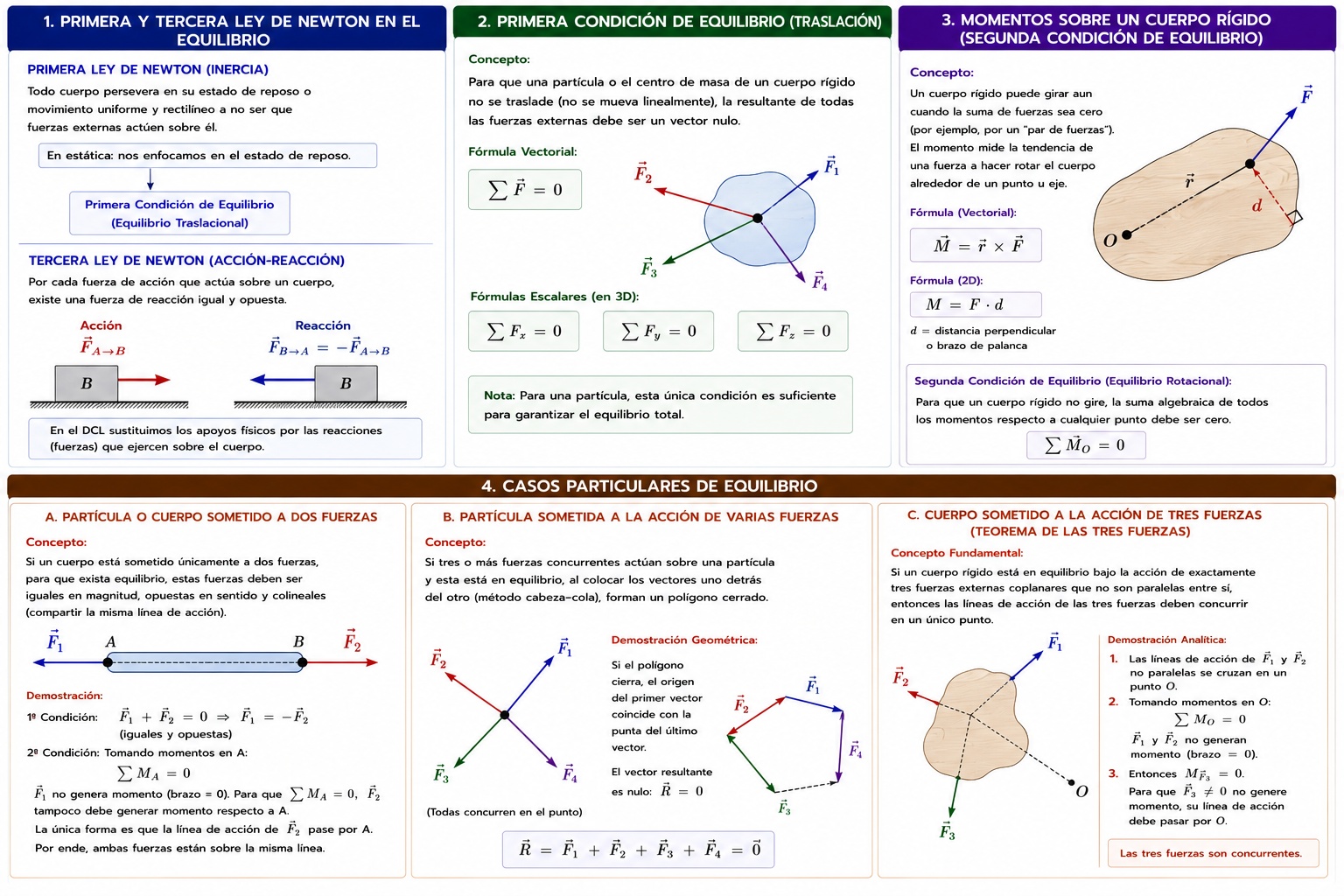
1. Primera y Tercera Ley de Newton en el Equilibrio
La Primera Ley de Newton (Inercia):
Establece que todo cuerpo persevera en su estado de reposo o movimiento uniforme y rectilíneo a no ser que sea obligado a cambiar su estado por fuerzas impresas sobre él. En estática, nos enfocamos en el estado de reposo. Esto nos da la Primera Condición de Equilibrio (Equilibrio Traslacional).
La Tercera Ley de Newton (Acción-Reacción):
Dicta que por cada fuerza de acción que actúa sobre un cuerpo, existe una fuerza de reacción igual y opuesta. En el estudio del equilibrio, esto es vital para construir los Diagramas de Cuerpo Libre (DCL), ya que nos permite sustituir apoyos físicos (como el suelo, una bisagra o un cable) por los vectores de fuerza (reacciones) que ejercen sobre el objeto aislado.
2. Primera Condición de Equilibrio (Traslación)
Concepto:
Para que una partícula o el centro de masa de un cuerpo rígido no se traslade (no se mueva linealmente hacia ninguna parte), la resultante de todas las fuerzas externas que actúan sobre él debe ser estrictamente un vector nulo.
Fórmula Vectorial y Escalar:
$$ \sum \vec{F} = 0 $$
En el espacio tridimensional, esta ecuación vectorial se descompone en tres ecuaciones escalares independientes:
$$ \sum F_x = 0 $$
$$ \sum F_y = 0 $$
$$ \sum F_z = 0 $$
(Nota: Para una partícula, esta única condición es suficiente para garantizar el equilibrio total, ya que todas las fuerzas concurren en un mismo punto y no pueden causar rotación).
3. Momentos sobre un Cuerpo Rígido (Segunda Condición de Equilibrio)
A diferencia de una partícula, un cuerpo rígido tiene dimensiones físicas reales. Si aplicamos dos fuerzas de igual magnitud y sentidos opuestos, pero en diferentes puntos del cuerpo, la sumatoria de fuerzas es cero ($\sum \vec{F} = 0$), el cuerpo no se trasladará, pero comenzará a girar (esto se conoce como un "par de fuerzas" o torque puro).
Concepto de Momento ($M$):
El momento es la tendencia de una fuerza a hacer rotar un cuerpo rígido alrededor de un eje o punto específico.
Fórmula (Definición Vectorial y Escalar):
El momento es el producto cruz entre el vector posición ($\vec{r}$, medido desde el punto de giro hasta el punto de aplicación de la fuerza) y el vector fuerza ($\vec{F}$).
$$ \vec{M} = \vec{r} \times \vec{F} $$
En dos dimensiones, la magnitud del momento es fuerza por la distancia perpendicular o brazo de palanca ($d$):
$$ M = F \cdot d $$
Segunda Condición de Equilibrio (Equilibrio Rotacional):
Para que un cuerpo rígido no gire, la suma algebraica de todos los momentos generados por todas las fuerzas externas respecto a cualquier punto arbitrario debe ser cero.
$$ \sum \vec{M}_O = 0 $$
4. Casos Particulares de Equilibrio
El análisis estático se simplifica enormemente cuando identificamos que el sistema obedece a ciertas geometrías especiales de carga.
A. Partícula o Cuerpo Sometido a Dos Fuerzas
Concepto:
Si un elemento estructural (como una barra o un cable en una armadura) está cargado únicamente por dos fuerzas en diferentes puntos, para que exista equilibrio, estas dos fuerzas no solo deben ser iguales en magnitud y opuestas en sentido, sino que deben compartir exactamente la misma línea de acción (deben ser colineales).
Demostración:
Sean $\vec{F}_1$ aplicada en el punto $A$ y $\vec{F}_2$ en el punto $B$.
- Por la 1ª condición: $\vec{F}_1 + \vec{F}_2 = 0 \implies \vec{F}_1 = -\vec{F}_2$. (Son iguales y opuestas).
- Por la 2ª condición: Si tomamos sumatoria de momentos en el punto $A$, la fuerza $\vec{F}_1$ no genera momento (distancia cero). Por lo tanto, para que $\sum M_A = 0$, la fuerza $\vec{F}_2$ tampoco debe generar momento respecto a $A$. La única forma geométrica de que $\vec{F}_2$ no genere momento respecto a $A$ es que su línea de acción pase directamente a través del punto $A$. Por ende, ambas fuerzas están sobre la misma línea.
B. Partícula Sometida a la Acción de Varias Fuerzas
Concepto:
Si tres o más fuerzas concurrentes actúan sobre una partícula y esta se encuentra en equilibrio, al dibujar los vectores de fuerza uno detrás del otro (método de cabeza y cola), deben formar un polígono perfectamente cerrado.
- Demostración Geométrica: Si el polígono cierra, el origen del primer vector coincide con la punta del último vector. El vector resultante (que va del inicio al fin) tiene magnitud cero, demostrando que $\vec{R} = 0$.
C. Cuerpo Sometido a la Acción de Tres Fuerzas (Teorema de las Tres Fuerzas)
Concepto Fundamental:
Si un cuerpo rígido está en equilibrio bajo la acción de exactamente tres fuerzas externas coplanares que no son paralelas entre sí, entonces las líneas de acción de las tres fuerzas deben concurrir (cruzarse) en un único punto.
Demostración Analítica:
Sean $\vec{F}_1$, $\vec{F}_2$ y $\vec{F}_3$ las tres fuerzas.
- Como no son paralelas, las líneas de acción de $\vec{F}_1$ y $\vec{F}_2$ obligatoriamente se cruzarán en algún punto geométrico del plano; llamemos a este punto "O".
- Si aplicamos la segunda condición de equilibrio (suma de momentos) tomando como pivote ese punto de intersección "O", resulta que $\vec{F}_1$ y $\vec{F}_2$ no generan ningún momento, porque sus brazos de palanca respecto a "O" son cero.
- Entonces, la ecuación queda: $\sum M_O = M_{\vec{F}3} = 0$.
- Para que la fuerza $\vec{F}_3$ (que sabemos que no es nula) no genere momento respecto al punto "O", su brazo de palanca debe ser cero. Esto obliga matemáticamente a que la línea de acción de la tercera fuerza ($\vec{F}_3$) también pase por el punto "O".
- (Por lo tanto, las tres fuerzas son concurrentes, y el cuerpo rígido puede analizarse como si fuera una simple partícula).