EL CÁLCULO INVERSO: ANTIDERIVADAS Y LA CINEMÁTICA DEL MOVIMIENTO RECTILÍNEO
Paul R
Autor Principal • Engineering Vault
Hasta ahora, el cálculo diferencial nos ha permitido encontrar la tasa de cambio instantánea (la derivada) de cualquier función conocida. Las Antiderivadas representan la operación matemática inversa: si conocemos la tasa a la que algo está cambiando, ¿podemos reconstruir la función original?
Este proceso, también conocido como integración indefinida, es la herramienta matemática que permite pasar de aceleraciones a velocidades, y de velocidades a posiciones.
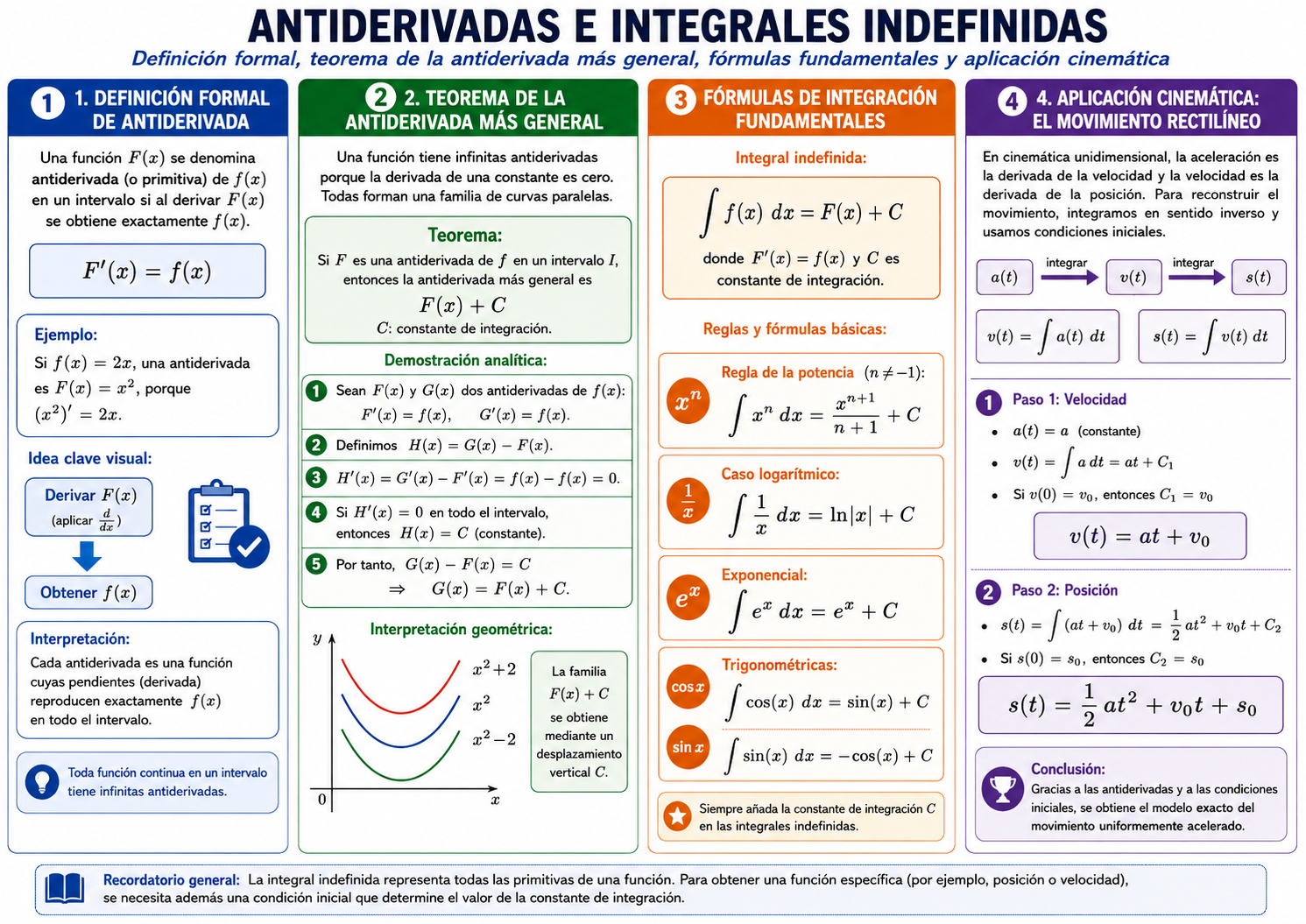
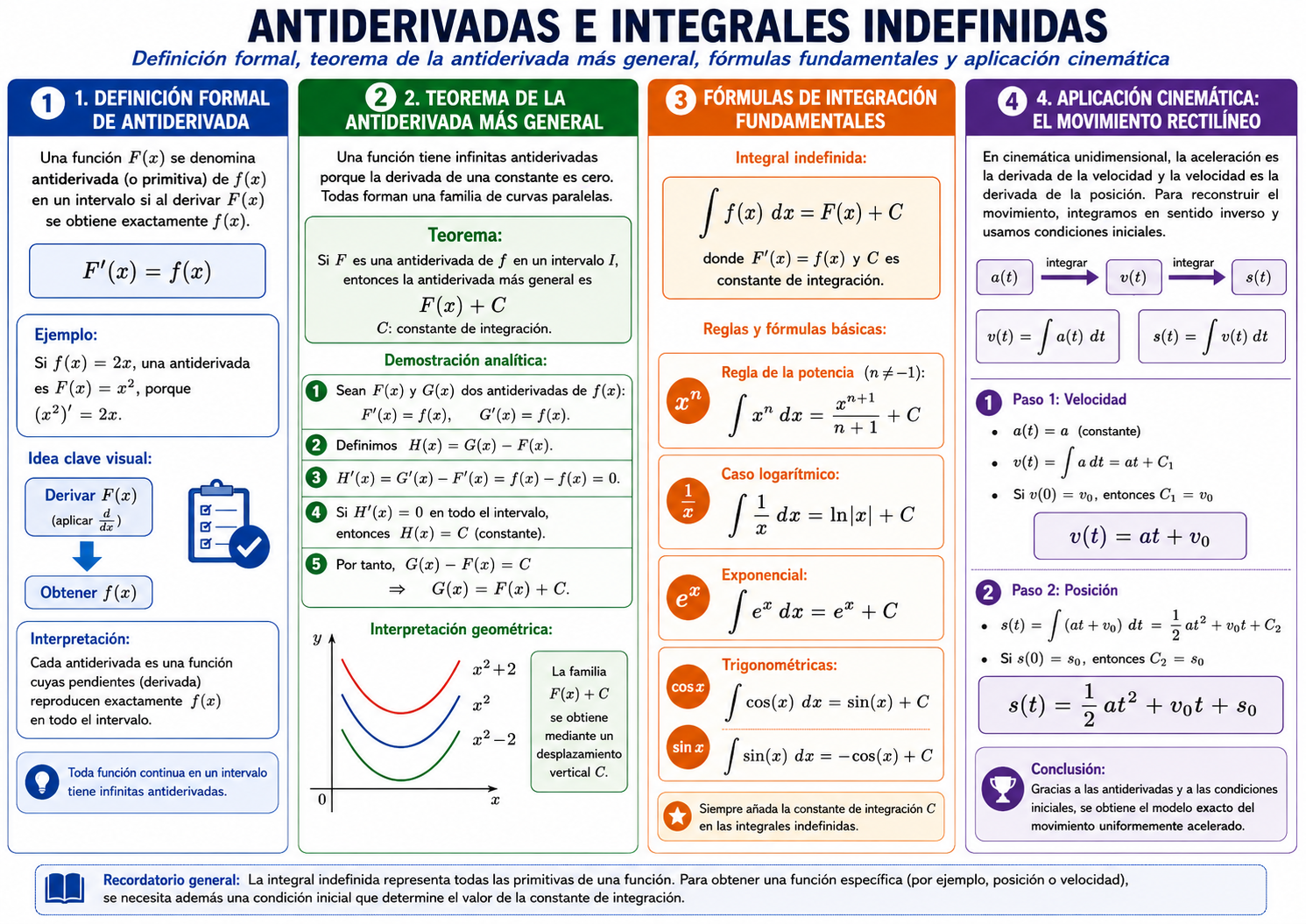
1. Definición Formal de Antiderivada
Concepto Fundamental:
Una función $F(x)$ se denomina antiderivada (o primitiva) de una función $f(x)$ en un intervalo dado si, al derivar $F(x)$, obtenemos exactamente $f(x)$.
Fórmula Definitoria:
$$ F'(x) = f(x) $$
(Por ejemplo: Si $f(x) = 2x$, entonces una antiderivada es $F(x) = x^2$, porque la derivada de $x^2$ es $2x$).
2. El Teorema de la Antiderivada Más General
Aquí surge un problema lógico: la derivada de una constante es cero.
La derivada de $x^2$ es $2x$. Pero la derivada de $x^2 + 5$ también es $2x$. Y la de $x^2 - 100$ también. Una sola función tiene infinitas antiderivadas, todas formando una "familia de curvas" paralelas entre sí.
Enunciado del Teorema:
Si $F$ es una antiderivada de $f$ en un intervalo $I$, entonces la antiderivada más general de $f$ en $I$ es:
$$ F(x) + C $$
donde $C$ es una constante real arbitraria (conocida como constante de integración).
Demostración Analítica del Teorema:
Sean $F(x)$ y $G(x)$ dos antiderivadas cualesquiera de la misma función $f(x)$. Por definición:
$$ F'(x) = f(x) \quad \text{y} \quad G'(x) = f(x) $$
Definamos una nueva función $H(x)$ que represente la diferencia entre ambas:
$$ H(x) = G(x) - F(x) $$
Derivemos esta nueva función:
$$ H'(x) = G'(x) - F'(x) = f(x) - f(x) = 0 $$
Un corolario del Teorema del Valor Medio establece que si la derivada de una función es idénticamente cero en todo un intervalo, la función no tiene pendiente alguna; por lo tanto, es una línea horizontal constante.
$$ H(x) = C \implies G(x) - F(x) = C \implies G(x) = F(x) + C $$
Queda demostrado matemáticamente que cualquier antiderivada de una función difiere de otra única y exclusivamente por un desplazamiento vertical $C$.
3. Fórmulas de Integración Fundamentales
La operación de encontrar la antiderivada general se denota con el símbolo de la integral indefinida ($\int$).
$$ \int f(x) \, dx = F(x) + C $$
Reglas Inversas Básicas:
- Regla de la Potencia: Si $n \neq -1$, $\int x^n \, dx = \frac{x^{n+1}}{n+1} + C$
- Logaritmo Natural: Si $n = -1$, $\int \frac{1}{x} \, dx = \ln|x| + C$
- Exponencial: $\int e^x \, dx = e^x + C$
- Trigonométricas:
- $\int \cos(x) \, dx = \sin(x) + C$
- $\int \sin(x) \, dx = -\cos(x) + C$
4. Aplicación Cinemática: El Movimiento Rectilíneo
En cinemática unidimensional, sabemos por el cálculo diferencial que la aceleración $a(t)$ es la derivada de la velocidad $v(t)$, y la velocidad es la derivada de la posición $s(t)$.
Para predecir el futuro de una partícula basándonos en las fuerzas que actúan sobre ella (su aceleración), trabajamos a la inversa utilizando integrales indefinidas:
$$ v(t) = \int a(t) \, dt $$
$$ s(t) = \int v(t) \, dt $$
Para encontrar el valor real de la constante geométrica $C$ en la vida real, utilizamos Condiciones Iniciales (los valores del cronómetro al inicio del experimento, generalmente en $t=0$).
Demostración Analítica (Ecuación del Movimiento Uniformemente Acelerado)
Vamos a deducir la fórmula clásica de la física para un objeto sometido a una aceleración constante, como la gravedad ($a(t) = a_{constante}$).
Paso 1: Encontrar la función de Velocidad.
Integramos la aceleración respecto al tiempo:
$$ v(t) = \int a \, dt = at + C_1 $$
Para hallar $C_1$, aplicamos la condición inicial: supongamos que en el instante $t = 0$, la velocidad del objeto era $v_0$.
$$ v(0) = a(0) + C_1 = v_0 \implies C_1 = v_0 $$
Sustituimos $C_1$:
$$ v(t) = at + v_0 $$
Paso 2: Encontrar la función de Posición.
Integramos la velocidad recién descubierta respecto al tiempo:
$$ s(t) = \int (at + v_0) \, dt = \frac{a \cdot t^2}{2} + v_0 t + C_2 $$
Para hallar $C_2$, aplicamos la segunda condición inicial: supongamos que en el instante $t = 0$, la posición inicial del objeto era $s_0$.
$$ s(0) = \frac{a(0)^2}{2} + v_0(0) + C_2 = s_0 \implies C_2 = s_0 $$
Sustituimos $C_2$ para obtener el modelo final de movimiento:
$$ s(t) = \frac{1}{2}at^2 + v_0 t + s_0 $$
Gracias a las antiderivadas y a dos condiciones iniciales, logramos derivar matemáticamente (sin experimentos) la fórmula exacta que rige desde la caída libre de un martillo hasta el frenado de un automóvil en línea recta.