DINÁMICA: SEGUNDA LEY DE NEWTON PARA SISTEMAS DE PARTÍCULAS Y TRAYECTORIAS CURVILÍNEAS
Paul R
Autor Principal • Engineering Vault
1. Segunda Ley de Newton para un Sistema de Partículas (Ecuación de Movimiento)
Cuando tenemos un sistema de $n$ partículas, cada una interactúa con fuerzas que provienen del exterior del sistema (Fuerzas Externas, $\vec{F}_i$) y fuerzas provenientes de otras partículas dentro del mismo sistema (Fuerzas Internas, $\vec{f}_i$).
Para una partícula específica "i" dentro de la nube, la Segunda Ley de Newton clásica establece:
$$ \vec{F}_{i, ext} + \vec{f}_{i, int} = m_i \vec{a}_i $$
La Demostración del Centro de Masa:
Si sumamos las ecuaciones de movimiento de todas las partículas del sistema, obtenemos:
$$ \sum_{i=1}^{n} \vec{F}_{i, ext} + \sum_{i=1}^{n} \vec{f}_{i, int} = \sum_{i=1}^{n} m_i \vec{a}_i $$
Por la Tercera Ley de Newton (Acción-Reacción), las fuerzas internas siempre ocurren en pares colineales, iguales y opuestos. Al sumarlas sobre todo el sistema, estas fuerzas internas se cancelan matemáticamente:
$$ \sum \vec{f}_{int} = 0 $$
Además, sabemos por cinemática que $\sum m_i \vec{a}_i = m_{total} \vec{a}_{cm}$ (masa total por la aceleración del centro de masa).
Por lo tanto, la Ecuación General de Movimiento para un Sistema es:
$$ \sum \vec{F}_{ext} = m_{total} \vec{a}_{cm} $$
Conclusión de Ingeniería: El centro de masa de cualquier sistema se mueve exactamente como si fuera una sola partícula puntual que concentra toda la masa y sobre la cual actúan todas las fuerzas externas.
2. Relación Fuerza-Aceleración y Cantidad de Movimiento Lineal
La "Cantidad de Movimiento Lineal" o Momentum Lineal ($\vec{L}$) de una partícula se define como el producto de su masa por su velocidad:
$$ \vec{L} = m \vec{v} $$
Para un sistema de partículas, la cantidad de movimiento lineal total es la suma vectorial de los momentos individuales, que equivale a la masa total por la velocidad del centro de masa:
$$ \vec{L}_{sis} = \sum m_i \vec{v}_i = m_{total} \vec{v}_{cm} $$
Demostración de la forma original de Newton:
Sir Isaac Newton no formuló originalmente su ley como $F=ma$, sino en términos de cantidad de movimiento: "La fuerza neta aplicada sobre un cuerpo es proporcional a la tasa de variación temporal de su cantidad de movimiento".
Si derivamos $\vec{L}$ respecto al tiempo (asumiendo masa constante):
$$ \frac{d\vec{L}}{dt} = \frac{d(m\vec{v})}{dt} = m \frac{d\vec{v}}{dt} = m\vec{a} $$
Por lo tanto:
$$ \sum \vec{F}_{ext} = \frac{d\vec{L}_{sis}}{dt} $$
3. Cantidad de Movimiento Angular y Variación (Momento)
Así como la cantidad de movimiento lineal describe la "inercia de traslación", la Cantidad de Movimiento Angular ($\vec{H}_O$) describe la "inercia de rotación" de una partícula respecto a un punto de referencia $O$. Se define como el momento de la cantidad de movimiento lineal:
$$ \vec{H}_O = \vec{r} \times m\vec{v} $$
(Donde $\vec{r}$ es el vector de posición desde $O$ hasta la partícula).
Demostración: El Momento como Variación del Momentum Angular
Queremos saber qué sucede si derivamos el momentum angular con respecto al tiempo:
$$ \frac{d\vec{H}_O}{dt} = \frac{d}{dt} (\vec{r} \times m\vec{v}) $$
Aplicamos la regla del producto para derivadas vectoriales:
$$ \frac{d\vec{H}_O}{dt} = \left(\frac{d\vec{r}}{dt} \times m\vec{v}\right) + \left(\vec{r} \times m \frac{d\vec{v}}{dt}\right) $$
Sabemos que $\frac{d\vec{r}}{dt} = \vec{v}$ y $\frac{d\vec{v}}{dt} = \vec{a}$. Reemplazando:
$$ \frac{d\vec{H}_O}{dt} = (\vec{v} \times m\vec{v}) + (\vec{r} \times m\vec{a}) $$
Dado que el producto cruz de un vector consigo mismo ($\vec{v} \times \vec{v}$) es cero, el primer término desaparece.
En el segundo término, reconocemos que $m\vec{a} = \sum \vec{F}$.
$$ \frac{d\vec{H}_O}{dt} = \vec{r} \times \sum \vec{F} $$
Dado que $\vec{r} \times \vec{F}$ es la definición fundamental de Momento ($\vec{M}_O$), hemos demostrado que:
$$ \sum \vec{M}_O = \frac{d\vec{H}_O}{dt} $$
Conclusión: Así como una fuerza externa es necesaria para cambiar la velocidad lineal, un momento externo (torque) es estrictamente necesario para cambiar la rotación de un sistema.
4. Componentes Tangencial y Normal en Trayectorias Curvilíneas ($t-n$)
Cuando un vehículo o partícula viaja por una trayectoria curva compleja (como una montaña rusa), usar un marco de referencia fijo $X-Y$ es matemáticamente torpe. Es mucho más eficiente anclar el sistema de coordenadas directamente sobre la partícula.
Vectores Unitarios $t$ y $n$:
- Vector Unitario Tangencial ($\hat{u}_t$): Siempre es tangente a la curva geométrica en el punto donde se encuentra la partícula. Apunta en la dirección del movimiento.
- Vector Unitario Normal ($\hat{u}_n$): Siempre es perpendicular a $\hat{u}_t$ y apunta estrictamente hacia el centro de curvatura de la trayectoria.
Demostración de las Componentes de la Aceleración:
La velocidad del cuerpo siempre es tangente a la trayectoria, por lo que se describe únicamente como la magnitud (rapidez, $v$) multiplicada por el vector unitario tangencial:
$$ \vec{v} = v \hat{u}_t $$
Para hallar la aceleración, derivamos la velocidad respecto al tiempo aplicando la regla de la cadena. (¡Ojo! A diferencia de los ejes $X-Y$, el vector $\hat{u}_t$ sí cambia de dirección a medida que la partícula recorre la curva, por lo que su derivada no es cero).
$$ \vec{a} = \frac{d\vec{v}}{dt} = \left(\frac{dv}{dt}\right)\hat{u}_t + v \left(\frac{d\hat{u}_t}{dt}\right) $$
La geometría diferencial demuestra que la tasa de cambio de la dirección del vector tangencial es igual a la velocidad dividida por el radio de curvatura ($\rho$) en la dirección normal: $\frac{d\hat{u}_t}{dt} = \frac{v}{\rho} \hat{u}_n$.
Sustituyendo esto, obtenemos las dos componentes críticas de la aceleración:
$$ \vec{a} = \dot{v} \hat{u}_t + \frac{v^2}{\rho} \hat{u}_n $$
- Aceleración Tangencial ($a_t = \dot{v}$): Mide únicamente el cambio en la rapidez (acelerar o frenar).
- Aceleración Normal o Centrípeta ($a_n = \frac{v^2}{\rho}$): Mide únicamente el cambio en la dirección. Aunque vayas a velocidad constante en una curva, experimentarás aceleración normal.
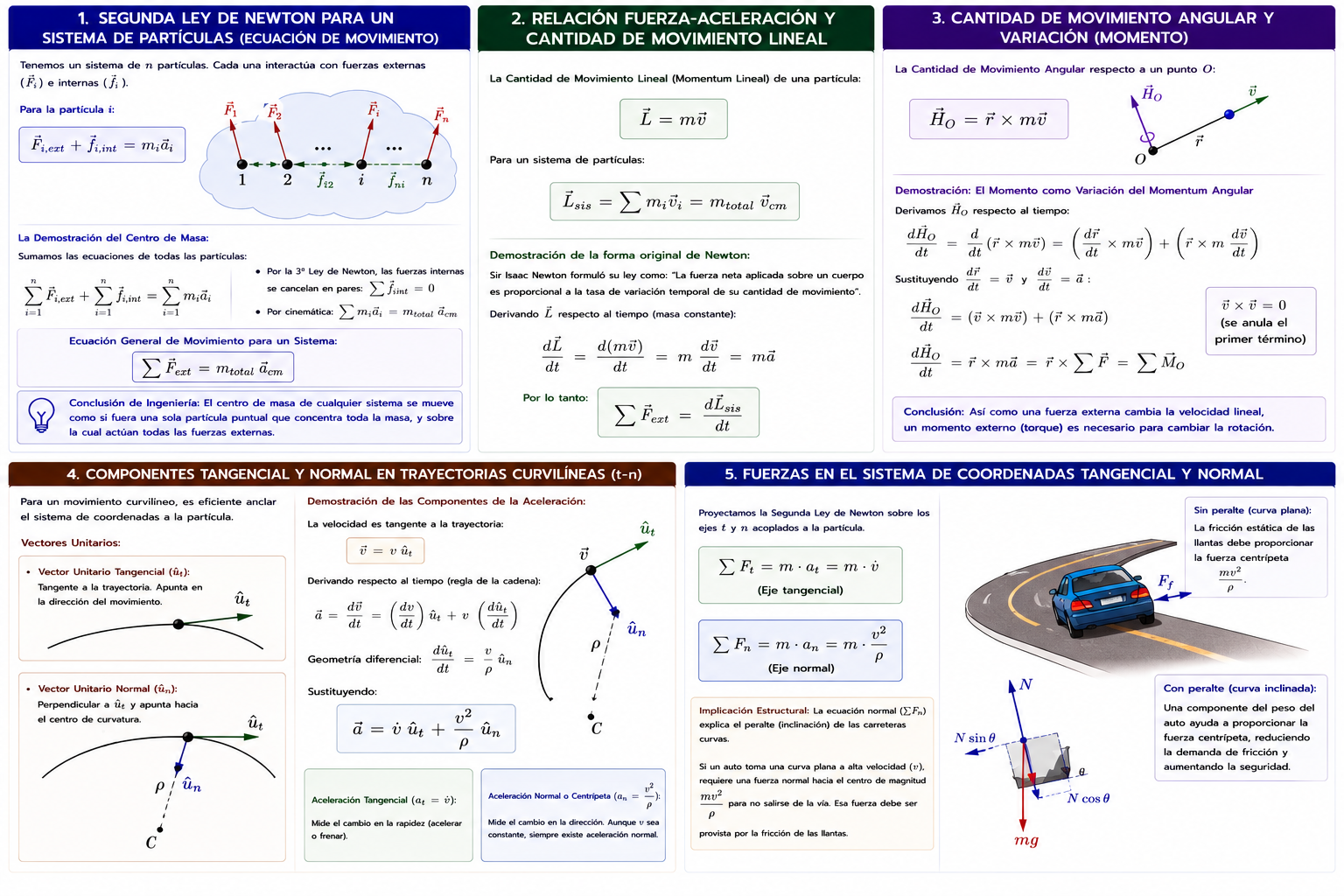
5. Fuerzas en el Sistema de Coordenadas Tangencial y Normal
Si proyectamos la Segunda Ley de Newton sobre estos nuevos ejes móviles acoplados a la partícula, obtenemos las ecuaciones prácticas de la dinámica curvilínea:
$$ \sum F_t = m \cdot a_t = m \cdot \dot{v} $$
$$ \sum F_n = m \cdot a_n = m \cdot \frac{v^2}{\rho} $$
- Implicación Estructural: La ecuación normal ($\sum F_n$) explica por qué las carreteras curvas tienen "peralte" (inclinación). Si un auto toma una curva plana a alta velocidad ($v$), requerirá una fuerza normal masiva empujándolo hacia el centro ($\frac{m v^2}{\rho}$) para no salirse de la vía. Esa fuerza debe ser provista por la fricción de las llantas. Si se inclina la carretera, una componente del peso del auto ayuda a proveer esa fuerza, haciendo el diseño mucho más seguro.
6. Conservación de la Cantidad de Movimiento Lineal para Sistemas de Partículas
El principio de conservación nos permite predecir el estado final de un sistema complejo (como el choque de dos vehículos o la explosión de un proyectil) sin necesidad de conocer los detalles complicados de las fuerzas internas que actuaron durante el evento, siempre y cuando el sistema esté aislado de fuerzas externas.
A. Concepto Fundamental
Si la suma vectorial de todas las fuerzas externas que actúan sobre un sistema de partículas es igual a cero, la cantidad de movimiento lineal total del sistema se mantiene constante en magnitud, dirección y sentido, independientemente de la naturaleza de las fuerzas internas (como impactos, fricciones internas o explosiones) que ocurran entre las partículas del sistema.
B. Demostración Matemática
En el punto 2 de nuestra investigación anterior, demostramos que la relación entre la fuerza externa neta y la cantidad de movimiento del sistema ($\vec{L}_{sis}$) está dada por:
$$ \sum \vec{F}_{ext} = \frac{d\vec{L}_{sis}}{dt} $$
Si el sistema está "aislado" mecánicamente, significa que no hay fuerzas externas actuando sobre él, o que las fuerzas externas se anulan mutuamente ($\sum \vec{F}_{ext} = 0$). Sustituyendo esto en la ecuación diferencial:
$$ 0 = \frac{d\vec{L}_{sis}}{dt} $$
En el cálculo, la única función cuya derivada respecto al tiempo es cero, es una constante. Por lo tanto, integramos ambas partes y queda demostrado que:
$$ \vec{L}_{sis} = \text{Constante} $$
Para evaluar un sistema antes (estado 1) y después (estado 2) de un evento interno:
$$ \vec{L}_{inicial} = \vec{L}_{final} $$
$$ \sum_{i=1}^{n} m_i (\vec{v}_i)_1 = \sum_{i=1}^{n} m_i (\vec{v}_i)_2 $$
C. Implicación Directa sobre el Centro de Masa
Sabemos que la cantidad de movimiento total de un sistema se puede expresar en función de su centro de masa:
$$ \vec{L}_{sis} = m_{total} \vec{v}_{cm} $$
Si aplicamos la ley de conservación ($\vec{L}_{sis} = \text{Constante}$), y considerando que la masa total del sistema no cambia, esto obliga matemáticamente a que la velocidad del centro de masa ($\vec{v}_{cm}$) sea estrictamente constante.
- Caso Práctico (Explosión de un Proyectil): Imagina un proyectil balístico describiendo una parábola perfecta en el aire (sometido solo a la gravedad). Si explota en mil pedazos en pleno vuelo debido a una carga interna, las partículas saldrán disparadas en todas direcciones caóticamente. Sin embargo, como la explosión fue una fuerza interna, el centro de masa de esa nube de metralla seguirá trazando exactamente la misma parábola original que trazaba el proyectil intacto, a la misma velocidad.
D. Conservación en Ejes Específicos
En problemas de ingeniería, es muy común que la suma de fuerzas externas no sea cero en todas las direcciones, pero sí en una de ellas.
Dado que el momento lineal es un vector, la conservación se puede aplicar independientemente en los ejes $X, Y$ o $Z$.
- Ejemplo: Dos vagones de tren colisionan sobre una vía recta. En el eje vertical ($Y$), actúan los pesos y las normales (fuerzas externas). Pero en el eje horizontal ($X$), asumiendo que no hay fricción externa considerable, $\sum F_x = 0$. Por lo tanto, puedes afirmar con absoluta certeza que el momento lineal del tren solo en el eje X se conserva antes, durante y después del choque:
- $$ (m_A v_A + m_B v_B)_{inicial} = (m_A v_A + m_B v_B)_{final} $$

