DINÁMICA DEL SÓLIDO RÍGIDO: TRASLACIÓN, ROTACIÓN Y MOVIMIENTO PLANO
Paul R
Autor Principal • Engineering Vault
1. Tipos de Movimiento de un Sólido Rígido
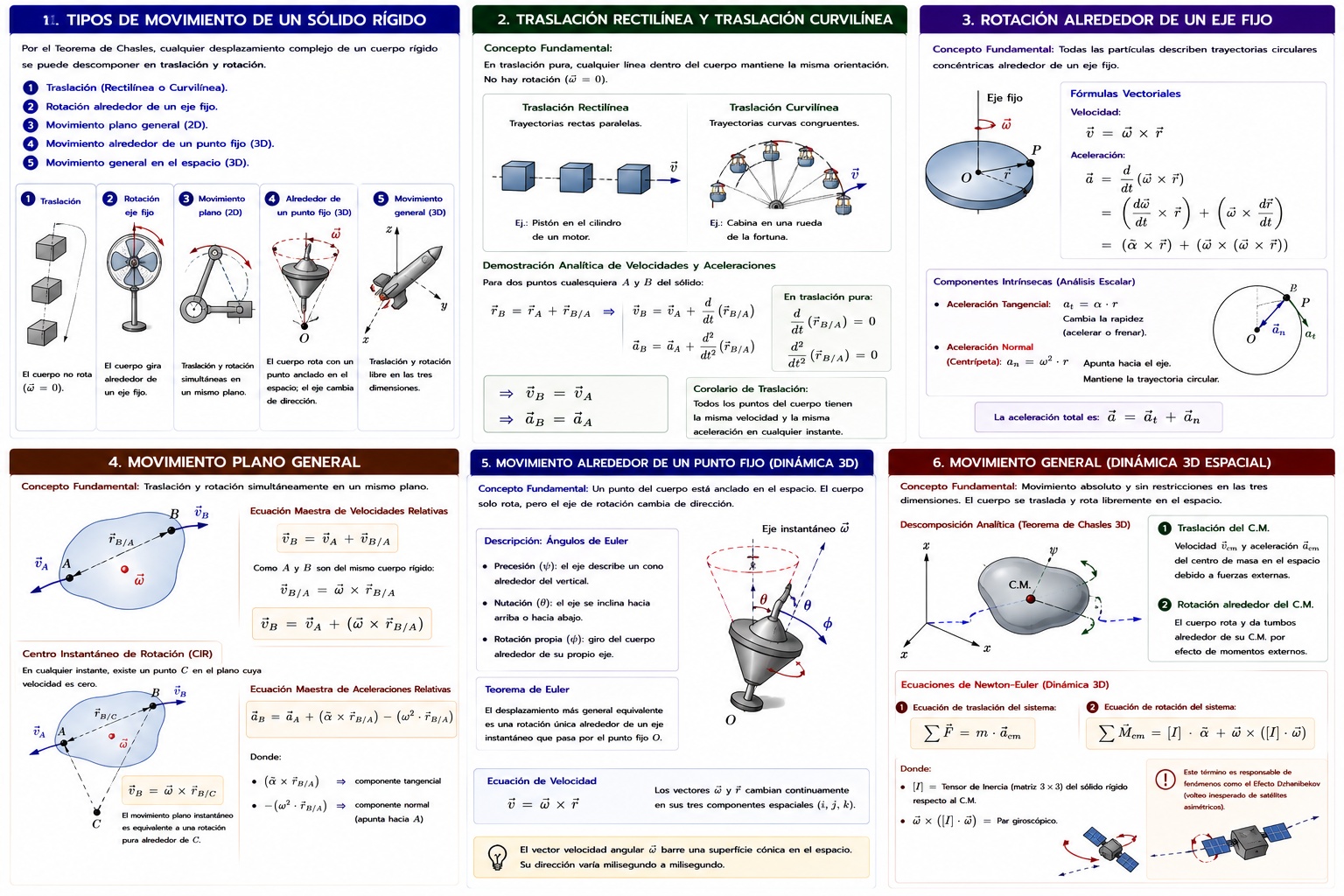
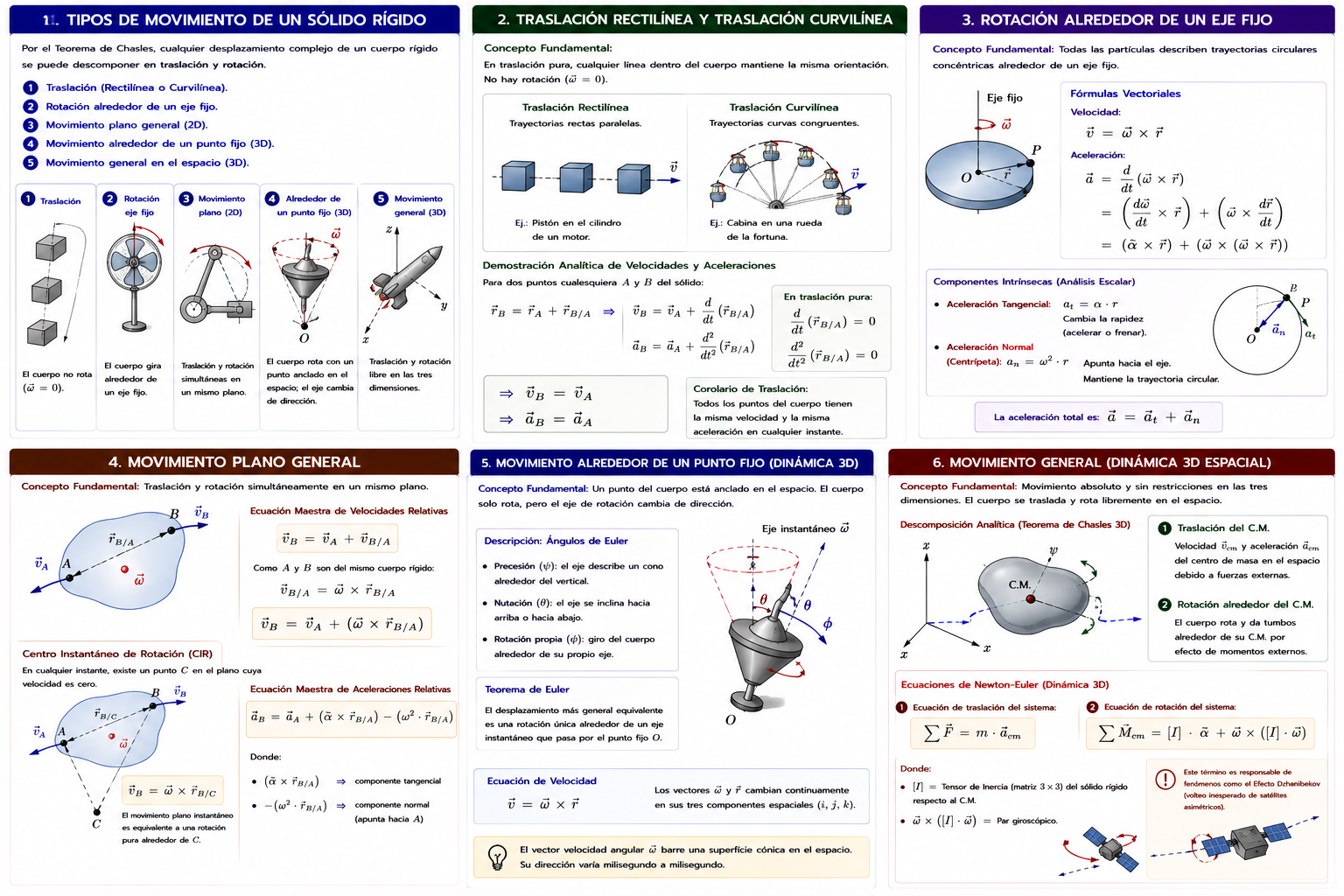
Por el Teorema de Chasles, sabemos que cualquier desplazamiento complejo de un cuerpo rígido puede descomponerse en dos movimientos fundamentales: traslación y rotación. Dependiendo de cómo se combinen estos factores y de si ocurren en un plano o en el espacio 3D, el movimiento se clasifica en cinco grandes categorías:
- Traslación (Rectilínea o Curvilínea).
- Rotación alrededor de un eje fijo.
- Movimiento plano general (2D).
- Movimiento alrededor de un punto fijo (3D).
- Movimiento general en el espacio (3D).
2. Traslación Rectilínea y Traslación Curvilínea
Concepto Fundamental:
Se dice que un cuerpo rígido está en traslación pura cuando cualquier línea recta trazada dentro del cuerpo mantiene siempre la misma orientación (permanece paralela a su posición original) a lo largo de todo el movimiento. Es decir, el cuerpo no rota absolutamente nada ($\vec{\omega} = 0$).
- Traslación Rectilínea: Todos los puntos del cuerpo describen trayectorias que son líneas rectas paralelas. (Ej. El pistón dentro del cilindro de un motor).
- Traslación Curvilínea: Todos los puntos del cuerpo describen trayectorias que son curvas congruentes (idénticas). (Ej. La cabina del pasajero en una rueda de la fortuna clásica; gira en un círculo general, pero la cabina en sí siempre se mantiene vertical).
Demostración Analítica de Velocidades y Aceleraciones:
Tomemos dos puntos cualesquiera, $A$ y $B$, dentro del sólido rígido. Su vector de posición relativa es:
$$ \vec{r}_B = \vec{r}_A + \vec{r}_{B/A} $$
Derivando con respecto al tiempo para obtener la velocidad:
$$ \vec{v}_B = \vec{v}_A + \frac{d}{dt}(\vec{r}_{B/A}) $$
Como el cuerpo es rígido, la longitud del vector $\vec{r}_{B/A}$ no cambia. Como el cuerpo está en traslación pura (no rota), la dirección y orientación de $\vec{r}_{B/A}$ tampoco cambia. Por lo tanto, su derivada temporal es estrictamente cero.
$$ \vec{v}_B = \vec{v}_A $$
Derivando nuevamente, demostramos lo mismo para la aceleración:
$$ \vec{a}_B = \vec{a}_A $$
Corolario de Traslación: En cualquier instante de una traslación pura, todos los puntos del cuerpo tienen exactamente la misma velocidad y la misma aceleración. El análisis cinemático del cuerpo entero se reduce al análisis de una sola partícula.
3. Rotación Alrededor de un Eje Fijo
Concepto Fundamental:
En este movimiento, todas las partículas que conforman el cuerpo rígido describen trayectorias circulares concéntricas alrededor de una misma línea imaginaria que permanece inmóvil en el espacio: el eje de rotación. (Ej. El giro del aspa de un ventilador de pedestal).
Fórmulas Vectoriales y Demostración:
Si el cuerpo gira con una velocidad angular $\vec{\omega}$ y una aceleración angular $\vec{\alpha}$, y tomamos un punto $P$ con un vector de posición $\vec{r}$ medido desde cualquier punto sobre el eje fijo:
- Velocidad: La magnitud de la velocidad es el radio perpendicular por $\omega$. Vectorialmente, esto es el producto cruz:
- $$ \vec{v} = \vec{\omega} \times \vec{r} $$
- Aceleración: Derivamos la velocidad respecto al tiempo usando la regla del producto:
- $$ \vec{a} = \frac{d}{dt}(\vec{\omega} \times \vec{r}) = \left(\frac{d\vec{\omega}}{dt} \times \vec{r}\right) + \left(\vec{\omega} \times \frac{d\vec{r}}{dt}\right) $$
- Sabiendo que la derivada de la velocidad angular es la aceleración angular ($\vec{\alpha}$) y que la derivada de la posición es la velocidad ($\vec{v} = \vec{\omega} \times \vec{r}$), sustituimos:
- $$ \vec{a} = (\vec{\alpha} \times \vec{r}) + (\vec{\omega} \times (\vec{\omega} \times \vec{r})) $$
Componentes Intrínsecas (Análisis Escalar):
Físicamente, la aceleración de cualquier punto en el objeto rotante se descompone en:
- Aceleración Tangencial ($a_t = \alpha \cdot r$): Causa el cambio en la rapidez de rotación (acelerar o frenar el motor).
- Aceleración Normal o Centrípeta ($a_n = \omega^2 \cdot r$): Siempre apunta hacia el eje de rotación y es la responsable de obligar a la masa a seguir la trayectoria circular en lugar de salir disparada en línea recta.
4. Movimiento Plano General
Concepto Fundamental:
Es el movimiento más común en la ingeniería mecánica bidimensional. Ocurre cuando un cuerpo experimenta una traslación y una rotación simultáneamente en un mismo plano. (Ej. La biela de un motor o una rueda rodando por el suelo).
La Ecuación Maestra de Velocidades Relativas:
Para analizarlo, elegimos un punto de referencia base $A$ (cuya traslación medimos) y observamos cómo el resto del cuerpo (punto $B$) rota alrededor de $A$.
$$ \vec{v}_B = \vec{v}_A + \vec{v}_{B/A} $$
Como $A$ y $B$ pertenecen al mismo cuerpo rígido, la distancia entre ellos no cambia. El único movimiento relativo posible de $B$ respecto a $A$ es una rotación pura. Por lo tanto, sustituimos $\vec{v}_{B/A} = \vec{\omega} \times \vec{r}_{B/A}$:
$$ \vec{v}_B = \vec{v}_A + (\vec{\omega} \times \vec{r}_{B/A}) $$
Centro Instantáneo de Rotación (CIR):
Una demostración fascinante del movimiento plano general es que, en cualquier instante dado ($t$), siempre existe un punto matemático en el plano (que puede estar dentro o fuera del cuerpo real) cuya velocidad es temporalmente cero.
Si llamamos a este punto $C$, y lo usamos como nuestro punto base $A$ en la ecuación anterior, el término $\vec{v}_A$ desaparece:
$$ \vec{v}_B = \vec{\omega} \times \vec{r}_{B/C} $$
Esto demuestra que cualquier movimiento plano complejo, en un instante específico, puede ser estudiado analíticamente como una rotación pura alrededor del Centro Instantáneo de Rotación (CIR).
La Ecuación Maestra de Aceleraciones Relativas:
Derivando la ecuación de velocidad obtenemos la ley de distribución de aceleraciones en un plano:
$$ \vec{a}_B = \vec{a}_A + (\vec{\alpha} \times \vec{r}_{B/A}) - (\omega^2 \cdot \vec{r}_{B/A}) $$
(Nota: El signo negativo en el último término se debe a que, en el análisis vectorial 2D cruzado, $\vec{\omega} \times (\vec{\omega} \times \vec{r})$ colapsa matemáticamente en un vector que apunta en sentido opuesto al vector de posición $\vec{r}$).
5. Movimiento Alrededor de un Punto Fijo (Dinámica 3D)
Concepto Fundamental:
Cuando pasamos a tres dimensiones, la cinemática se vuelve significativamente más compleja. Si un punto del cuerpo está anclado a un soporte espacial (como la punta de un trompo o la rótula de un brazo robótico), el cuerpo solo puede rotar, pero el eje de rotación puede cambiar de dirección en el espacio.
- Descripción Matemática: El movimiento se define clásicamente mediante los Ángulos de Euler (Precesión, Nutación y Rotación Propia).
- El Teorema de Euler: Establece que el desplazamiento más general de un cuerpo rígido con un punto fijo es equivalente a una rotación única alrededor de un eje que pasa por dicho punto fijo. El vector velocidad angular $\vec{\omega}$ indica la dirección de ese eje instantáneo de rotación, el cual va cambiando milisegundo a milisegundo, barriendo una superficie cónica en el espacio (cono del cuerpo y cono del espacio).
La ecuación de velocidad sigue siendo $\vec{v} = \vec{\omega} \times \vec{r}$, pero aquí los vectores cambian continuamente en sus tres componentes espaciales ($i, j, k$).
6. Movimiento General (Dinámica 3D Espacial)
Concepto Fundamental:
Es el movimiento absoluto y sin restricciones en las tres dimensiones. Un cuerpo sólido que se lanza libremente por el aire (como un proyectil irregular o una nave espacial) está en movimiento general.
Descomposición Analítica (Teorema de Chasles 3D):
Cualquier movimiento espacial se estudia tomando el Centro de Masa (C.M.) como punto base.
- Translación Tridimensional: Evaluamos la velocidad lineal y la aceleración lineal del C.M. a través del espacio bajo la influencia de fuerzas externas.
- Rotación Tridimensional Acompañante: Evaluamos cómo el cuerpo rota y da tumbos alrededor de su propio C.M. debido a los momentos externos.
El cuerpo está regido por las dos ecuaciones tensoriales maestras de la dinámica tridimensional (Ecuaciones de Newton-Euler):
$$ \sum \vec{F} = m \cdot \vec{a}_{cm} $$
$$ \sum \vec{M}_{cm} = [I] \cdot \vec{\alpha} + \vec{\omega} \times ([I] \cdot \vec{\omega}) $$
Donde $[I]$ ya no es un simple escalar, sino el Tensor de Inercia del Sólido Rígido (una matriz 3x3), y el último término, conocido como el par giroscópico, es el responsable de los extraños y contraintuitivos comportamientos de los cuerpos asimétricos girando en el espacio (Efecto Dzhanibekov).