DINÁMICA DEL MOVIMIENTO PLANO CON RESTRICCIONES
Paul R
Autor Principal • Engineering Vault
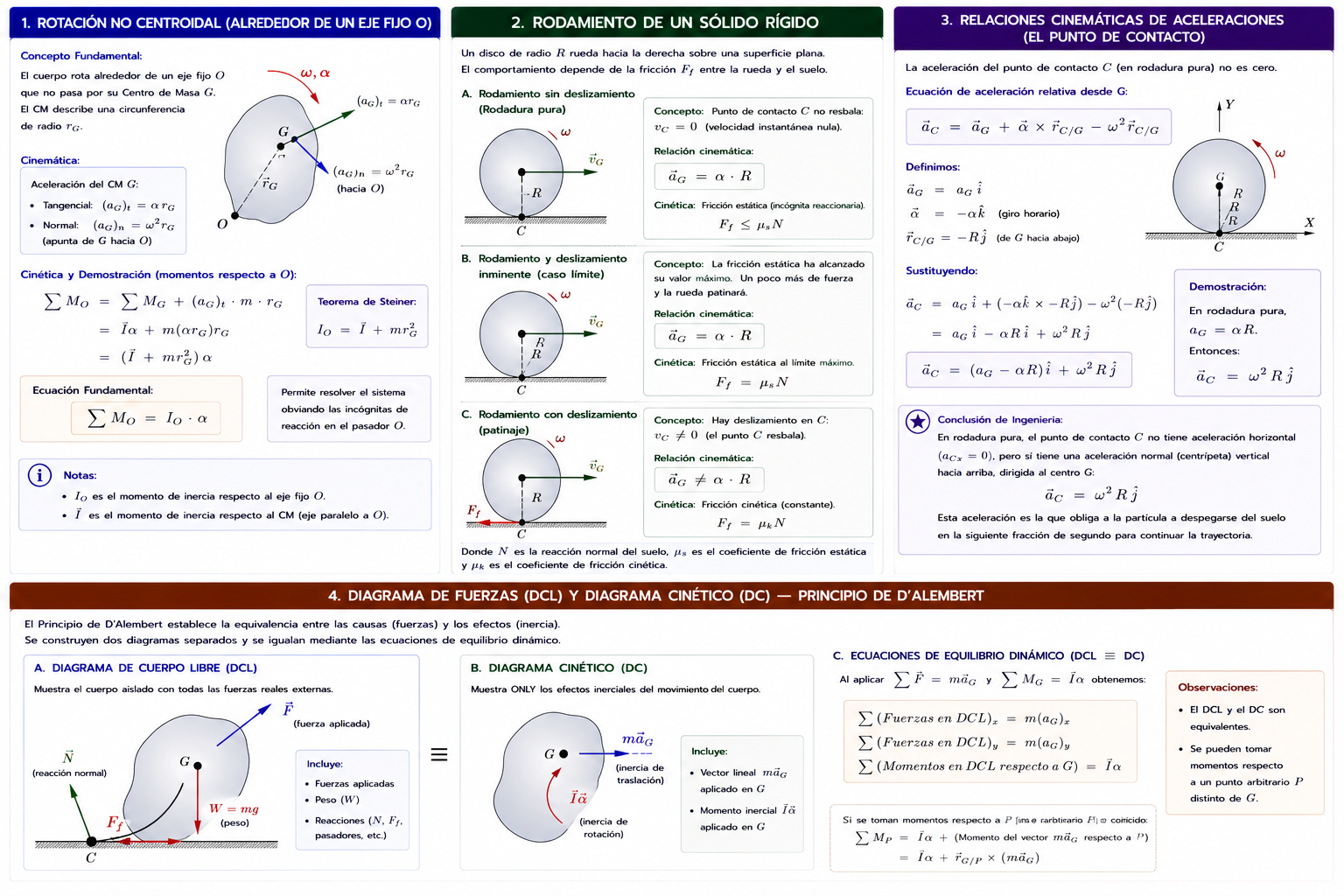
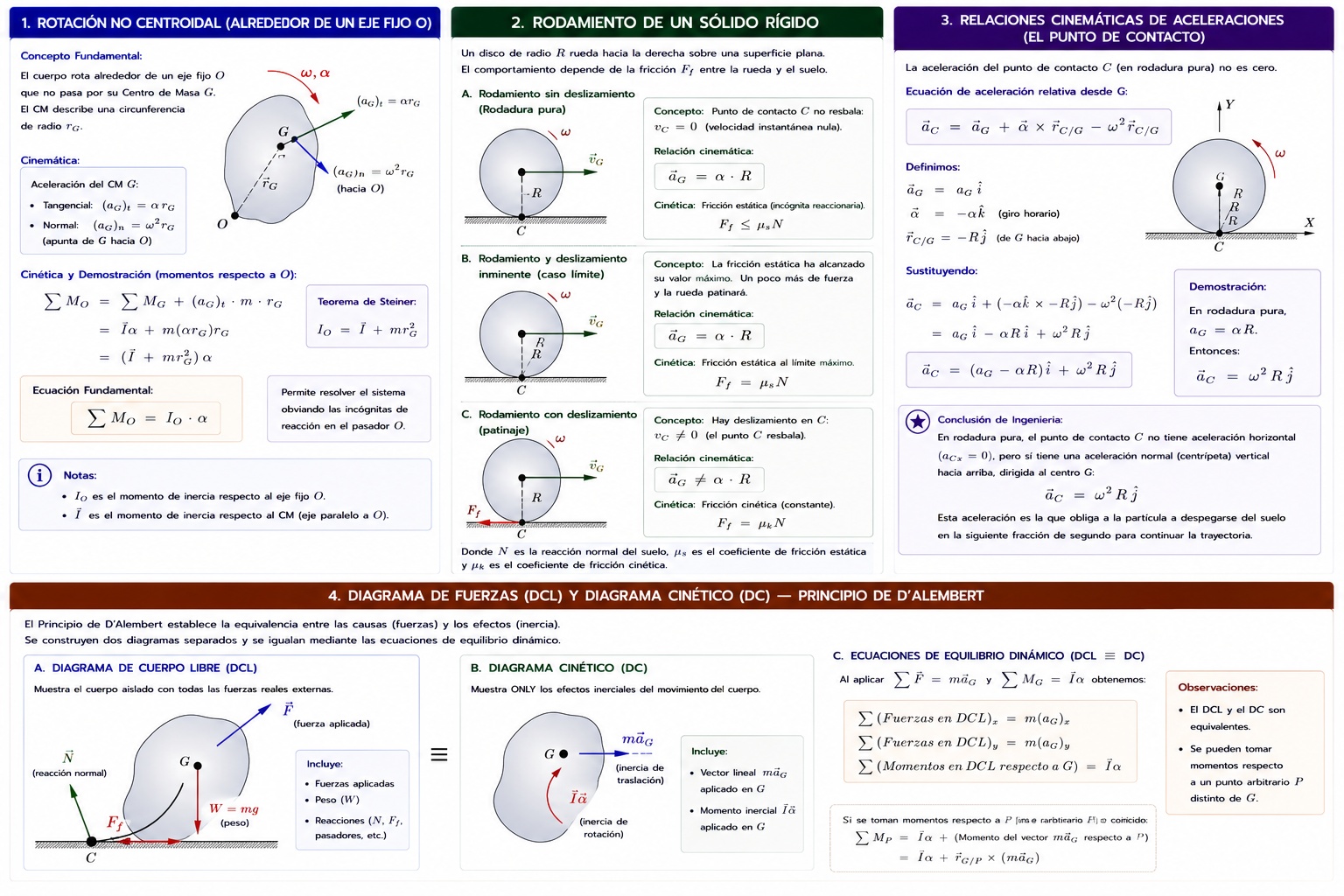
1. Rotación No Centroidal (Alrededor de un Eje Fijo Fijo)
Concepto Fundamental:
Ocurre cuando un cuerpo rota alrededor de un eje fijo ($O$) que no pasa por su Centro de Masa ($G$). Un ejemplo clásico es un péndulo físico o una puerta girando sobre sus bisagras.
En este escenario, el centro de masa $G$ se ve obligado a viajar en una trayectoria circular de radio $r_G$ (la distancia desde el pasador $O$ hasta $G$).
Cinemática:
Por la restricción circular, la aceleración del centro de masa ($\vec{a}_G$) se descompone siempre en dos componentes intrínsecas:
- Tangencial: $(a_G)_t = \alpha \cdot r_G$
- Normal: $(a_G)_n = \omega^2 \cdot r_G$ (apuntando de $G$ hacia el pasador $O$).
Cinética y Demostración:
Si aplicamos la Segunda Ley de Newton-Euler tomando momentos respecto al pasador $O$:
$$ \sum M_O = \sum M_G + (a_G)_t \cdot m \cdot r_G $$
Sustituyendo $\sum M_G = \bar{I}\alpha$ y $(a_G)_t = \alpha r_G$:
$$ \sum M_O = \bar{I}\alpha + m(\alpha r_G)r_G = (\bar{I} + m r_G^2)\alpha $$
Aquí interviene el Teorema de Steiner (Ejes Paralelos). Sabemos que el momento de inercia respecto a $O$ es $I_O = \bar{I} + m r_G^2$. Sustituyendo esto, demostramos la ecuación fundamental de la rotación no centroidal:
$$ \sum M_O = I_O \cdot \alpha $$
(Esta ecuación permite resolver el sistema obviando las incógnitas de reacción en el pasador $O$).
2. Rodamiento de un Sólido Rígido
El rodamiento de un disco o rueda sobre una superficie plana es el caso más emblemático de movimiento restringido. El comportamiento del disco depende exclusivamente de la magnitud de la fuerza de fricción ($F_f$) entre el disco y el suelo.
El análisis se divide en tres regímenes distintos:
A. Rodamiento sin Deslizamiento (Rodadura Pura)
- Concepto: El disco gira y avanza en perfecta sincronía. El punto de contacto con el suelo ($C$) no resbala; su velocidad instantánea es estrictamente cero ($v_C = 0$).
- Relación Cinemática:
- $$ a_G = \alpha \cdot R $$
- Cinética: La fricción que actúa es una fuerza de fricción estática. Es una incógnita reaccionaria cuyo valor se halla por las ecuaciones de equilibrio, y no por la fórmula de $\mu$. La única restricción es que esta fuerza debe ser menor al límite de ruptura:
- $$ F_f \le \mu_s N $$
B. Rodamiento y Deslizamiento Inminente
- Concepto: Es el caso límite microscópico. El disco sigue rodando puramente, pero la fuerza externa aplicada ha llevado a la fricción estática a su valor máximo absoluto. Un Newton más de fuerza, y la llanta patinará.
- Relación Cinemática: Sigue aplicando $a_G = \alpha \cdot R$.
- Cinética: Aquí, y solo aquí, la fricción estática toma su valor teórico máximo:
- $$ F_f = \mu_s N $$
C. Rodamiento con Deslizamiento (Patinaje)
- Concepto: El equilibrio cinemático se rompe. La rueda gira más rápido de lo que avanza (como al acelerar un auto en hielo) o avanza más rápido de lo que gira (como al bloquear los frenos). El punto de contacto $C$ raspa contra el suelo ($v_C \neq 0$).
- Relación Cinemática: Falla la restricción. La aceleración lineal y la angular se vuelven completamente independientes:
- $$ a_G \neq \alpha \cdot R $$
- Cinética: Como las superficies resbalan, la fuerza de fricción cae a su valor cinético constante, independientemente de qué tan rápido resbale:
- $$ F_f = \mu_k N $$
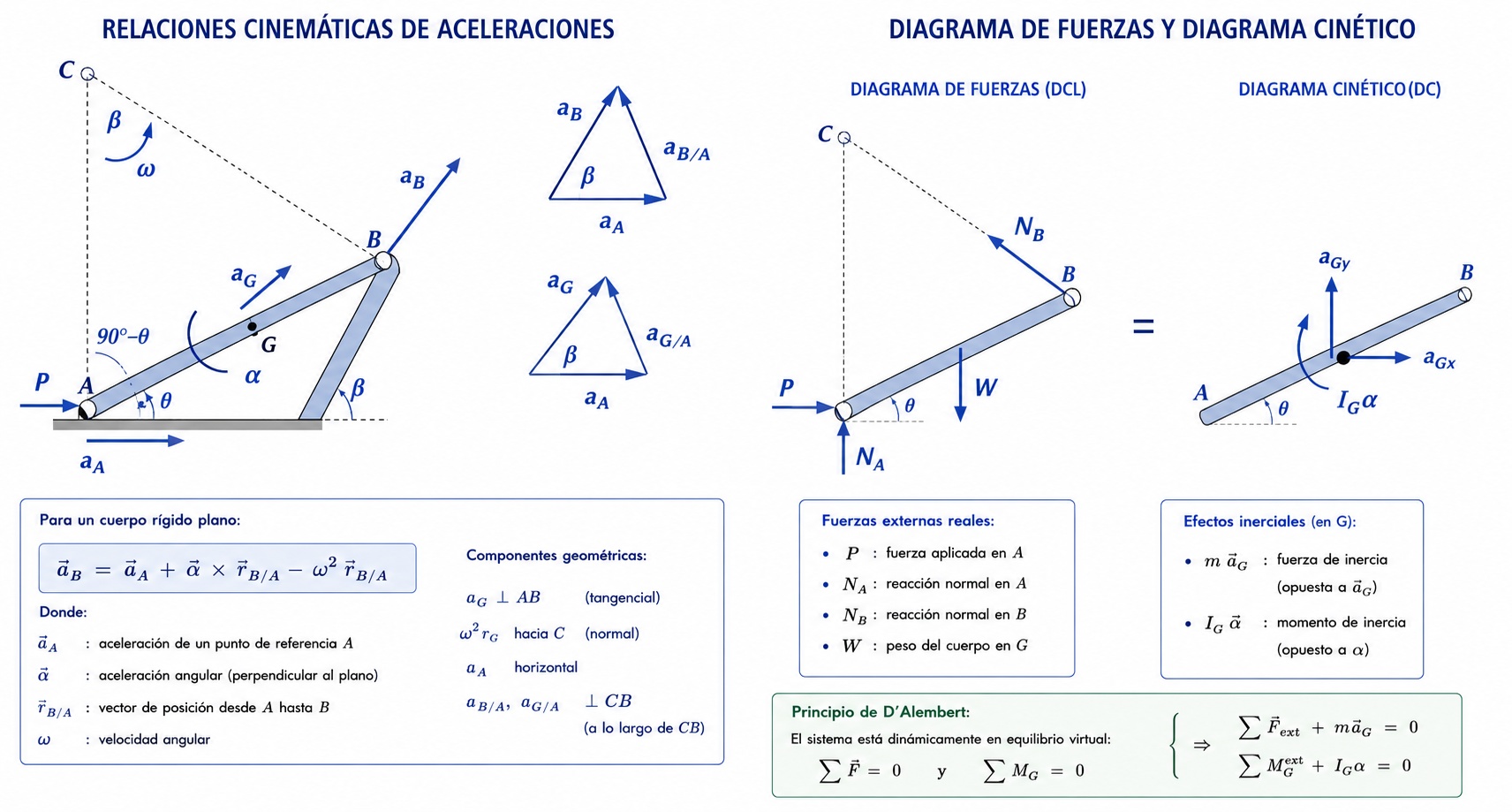
3. Relaciones Cinemáticas de Aceleraciones (El Punto de Contacto)
Existe un error de concepto muy común: creer que si la velocidad del punto de contacto es cero ($v_C = 0$) en rodadura pura, su aceleración también lo es. Demostraremos que esto es falso.
Analicemos la aceleración del punto de contacto $C$ usando la ecuación de aceleración relativa desde el centro $G$:
$$ \vec{a}_C = \vec{a}_G + \vec{\alpha} \times \vec{r}_{C/G} - \omega^2 \vec{r}_{C/G} $$
Definiendo un sistema coordenado donde la rueda avanza a la derecha (eje $X$ positivo) y el eje $Y$ apunta hacia arriba:
- $\vec{a}_G = a_G \hat{i}$
- $\vec{\alpha} = -\alpha \hat{k}$ (giro horario)
- $\vec{r}_{C/G} = -R \hat{j}$ (de $G$ hacia abajo hasta $C$)
Sustituyendo y resolviendo el producto cruz:
$$ \vec{a}_C = a_G \hat{i} + (-\alpha \hat{k} \times -R \hat{j}) - \omega^2(-R \hat{j}) $$
$$ \vec{a}_C = a_G \hat{i} - \alpha R \hat{i} + \omega^2 R \hat{j} $$
Factorizando:
$$ \vec{a}_C = (a_G - \alpha R)\hat{i} + \omega^2 R \hat{j} $$
Demostración: Si existe rodamiento puro, sabemos que $a_G = \alpha R$. Por lo tanto, el término en $\hat{i}$ se cancela a cero. Queda demostrado que:
$$ \vec{a}_C = \omega^2 R \hat{j} $$
Conclusión de Ingeniería: En rodadura pura, el punto de contacto no tiene aceleración horizontal, pero sí tiene una aceleración normal (centrípeta) apuntando verticalmente hacia el centro del disco. Es esta aceleración la que obliga a la partícula a despegarse del suelo en la siguiente fracción de segundo para continuar la curva de la cicloide.
4. Diagrama de Fuerzas (DCL) y Diagrama Cinético (DC)
Para resolver sistemáticamente problemas de sólidos rígidos, el Principio de D'Alembert establece la equivalencia visual entre las causas (fuerzas) y los efectos (inercia). Esto se modela dibujando dos diagramas separados e igualándolos matemáticamente.
El Diagrama de Cuerpo Libre (DCL)
Muestra el contorno aislado del cuerpo con todas las fuerzas reales aplicadas:
- El Peso ($W$) actuando en el CM.
- Fuerzas Aplicadas (motores, cables, empujes).
- Fuerzas Reactivas (Normal, Fricción o reacciones en pasadores).
El Diagrama Cinético (DC)
Muestra el mismo contorno del cuerpo, pero sin ninguna fuerza externa. En su lugar, se dibujan exclusivamente los vectores que representan la inercia del cuerpo:
- Un vector lineal concentrado en el Centro de Masa, de magnitud $m \cdot \vec{a}_G$, apuntando en la dirección del movimiento lineal.
- Un momento circular concentrado en el Centro de Masa, de magnitud $\bar{I} \cdot \vec{\alpha}$, apuntando en el sentido del giro.
La Ecuación de Equilibrio Dinámico:
Visualmente, el DCL equivale al DC. Matemáticamente, esto engendra las tres ecuaciones maestras de resolución:
- $\sum (\text{Fuerzas en DCL})_x = m(a_G)_x$
- $\sum (\text{Fuerzas en DCL})_y = m(a_G)_y$
- $\sum (\text{Momentos en DCL respecto a } G) = \bar{I}\alpha$
(Consejo técnico: Se pueden tomar momentos en el DCL y en el DC respecto a un punto arbitrario $P$ distinto a $G$. En ese caso: $\sum M_P = \bar{I}\alpha + (\text{Momento del vector } m\vec{a}_G \text{ respecto a } P)$).