Dinámica Avanzada del Sólido Rígido: Cinemática Espacial y Ecuaciones de Euler en 3D
Paul R
Autor Principal • Engineering Vault

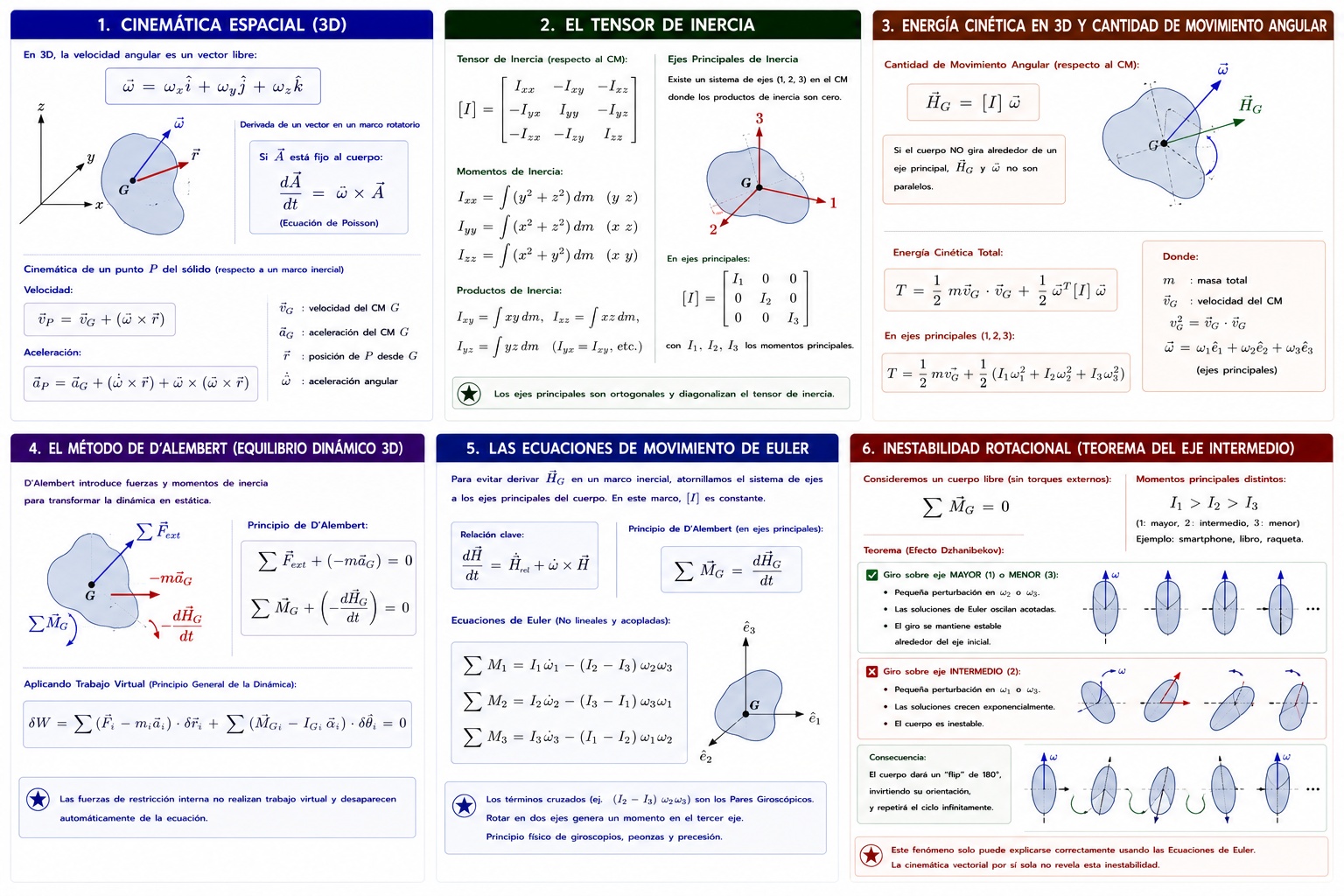
1. Cinemática Espacial (3D)
A diferencia del movimiento 2D, donde la rotación es un simple escalar ($\omega = \dot{\theta}$), en 3D la velocidad angular es un vector libre que puede apuntar en cualquier dirección y cambiar continuamente:
$$ \vec{\omega} = \omega_x \hat{i} + \omega_y \hat{j} + \omega_z \hat{k} $$
Derivada de un vector en un marco rotatorio:
El desafío de la cinemática 3D es que los propios ejes del cuerpo están girando. Si un vector $\vec{A}$ está fijo a un cuerpo rígido que rota con $\vec{\omega}$, su tasa de cambio absoluta respecto a un marco inercial fijo está dada por la ecuación cinemática de Poisson:
$$ \frac{d\vec{A}}{dt} = \vec{\omega} \times \vec{A} $$
Para un punto $P$ en el sólido con posición $\vec{r}$ desde el Centro de Masa, su velocidad y aceleración absolutas son:
- Velocidad: $\vec{v}_P = \vec{v}_G + (\vec{\omega} \times \vec{r})$
- Aceleración: $\vec{a}_P = \vec{a}_G + (\dot{\vec{\omega}} \times \vec{r}) + \vec{\omega} \times (\vec{\omega} \times \vec{r})$
2. El Tensor de Inercia
En 2D, la inercia rotacional es un solo número ($I$). En 3D, la masa se distribuye en tres ejes, creando un acoplamiento complejo. La inercia ya no es un escalar, sino un Tensor de Inercia (una matriz simétrica $3 \times 3$):
$$ [I] = \begin{bmatrix} I_{xx} & -I_{xy} & -I_{xz} \\ -I_{yx} & I_{yy} & -I_{yz} \\ -I_{zx} & -I_{zy} & I_{zz} \end{bmatrix} $$
- Momentos de Inercia ($I_{xx}, I_{yy}, I_{zz}$): Miden la resistencia a rotar alrededor de los ejes principales (ej. $I_{xx} = \int (y^2 + z^2) dm$).
- Productos de Inercia ($I_{xy}, I_{xz}, \dots$): Miden el desequilibrio dinámico. Si rotas un cuerpo desequilibrado alrededor del eje X, los productos de inercia generarán fuerzas centrífugas que intentarán arrancar el eje de sus soportes.
Ejes Principales de Inercia:
El álgebra lineal (Teorema Espectral) demuestra que para cualquier cuerpo sólido, sin importar su forma, siempre existe un sistema de coordenadas específico centrado en su CM donde todos los productos de inercia son exactamente cero. A estos se les llama Ejes Principales ($1, 2, 3$). La matriz se vuelve diagonal:
$$ [I] = \begin{bmatrix} I_1 & 0 & 0 \\ 0 & I_2 & 0 \\ 0 & 0 & I_3 \end{bmatrix} $$
3. Energía Cinética en 3D y Cantidad de Movimiento Angular
Conociendo el tensor, podemos formular los escalares y vectores del movimiento.
Cantidad de Movimiento Angular ($\vec{H}_G$):
En 3D espacial, el momento angular es el producto matricial del Tensor por el vector de velocidad angular:
$$ \vec{H}_G = [I] \vec{\omega} $$
(Nota crítica: Si el cuerpo no gira alrededor de un eje principal, la matriz $[I]$ tiene términos cruzados, lo que significa que $\vec{H}_G$ y $\vec{\omega}$ no apuntarán en la misma dirección).
Energía Cinética ($T$):
Aplicando el Teorema de Koenig, es la suma de la traslación pura y la rotación pura:
$$ T = \frac{1}{2} m \vec{v}_G \cdot \vec{v}_G + \frac{1}{2} \vec{\omega}^T [I] \vec{\omega} $$
Si alineamos nuestro análisis con los ejes principales, la energía cinética rotacional se simplifica enormemente a:
$$ T_{rot} = \frac{1}{2} (I_1 \omega_1^2 + I_2 \omega_2^2 + I_3 \omega_3^2) $$
4. El Método de D'Alembert (Equilibrio Dinámico 3D)
D'Alembert nos permite tratar este caos tridimensional como un problema de estática. Postula que la suma de las fuerzas/momentos reales más las "fuerzas/momentos de inercia" debe ser cero.
$$ \sum \vec{F}_{ext} + (-m\vec{a}_G) = 0 $$
$$ \sum \vec{M}_G + \left(-\frac{d\vec{H}_G}{dt}\right) = 0 $$
El desafío titánico aquí es el término $\frac{d\vec{H}_G}{dt}$. Como el tensor de inercia $[I]$ cambia constantemente en el espacio global a medida que el cuerpo da tumbos, es imposible derivar $\vec{H}_G$ desde un marco de referencia estacionario.
5. Las Ecuaciones de Movimiento de Euler
Para sortear el problema de un tensor cambiante, Leonhard Euler tuvo una idea brillante: Atornillar el sistema de coordenadas de análisis al propio cuerpo rígido (alineándolo con sus ejes principales).
En este marco rotatorio, el tensor $[I]$ es constante. Usando la regla de la derivada en marcos rotatorios ($\frac{d\vec{H}}{dt} = \dot{\vec{H}}_{rel} + \vec{\omega} \times \vec{H}$), Euler expandió el principio de D'Alembert ($\sum \vec{M} = \frac{d\vec{H}}{dt}$) en tres ecuaciones diferenciales acopladas no lineales:
$$ \sum M_1 = I_1 \dot{\omega}_1 - (I_2 - I_3) \omega_2 \omega_3 $$
$$ \sum M_2 = I_2 \dot{\omega}_2 - (I_3 - I_1) \omega_3 \omega_1 $$
$$ \sum M_3 = I_3 \dot{\omega}_3 - (I_1 - I_2) \omega_1 \omega_2 $$
Implicación en Ingeniería: El término cruzado (ej. $(I_2 - I_3) \omega_2 \omega_3$) se conoce como el Par Giroscópico. Significa que si obligas a un cuerpo a rotar en dos ejes simultáneamente, el cuerpo generará automáticamente un momento inercial reaccionario en el tercer eje. Este es el principio detrás de los giroscopios, las peonzas y la precesión de los planetas.
6. Inestabilidad Rotacional (El Teorema del Eje Intermedio)
Las Ecuaciones de Euler revelan uno de los fenómenos más extraños de la mecánica clásica: El Efecto Dzhanibekov o Teorema de la Raqueta de Tenis.
Imagina un cuerpo en el espacio libre sin fuerzas externas ($\sum M = 0$). Supongamos que sus momentos principales son distintos: $I_1 > I_2 > I_3$. (Ejemplo: un smartphone o un libro).
Demostración de Estabilidad:
- Si lo haces girar sobre su eje mayor ($I_1$) o su eje menor ($I_3$) y le das un pequeño golpe (una perturbación infinitesimal en $\omega_2$ o $\omega_3$), las ecuaciones de Euler demuestran que las soluciones oscilan de forma estable alrededor del eje original. El giro se mantiene constante.
- Si lo haces girar sobre su eje intermedio ($I_2$) e introduces la más mínima perturbación, la solución matemática se vuelve un crecimiento exponencial. El cuerpo no puede mantener el giro continuo; dará un tumbo violento (un "flip" de 180 grados), invertirá su orientación, y luego repetirá el ciclo infinitamente.