Centro de Masa de un Sistema: Conceptos, Fórmulas y Demostraciones
Paul R
Autor Principal • Engineering Vault
El concepto de Centro de Masa (C.M.) es uno de los pilares más elegantes y útiles de la mecánica clásica. Permite simplificar el análisis de sistemas inmensamente complejos —desde un sistema solar hasta una nube de gas o un bloque de concreto— reduciéndolos matemáticamente a una sola partícula.
A continuación, te presento una investigación detallada de este concepto.
1. Concepto Fundamental
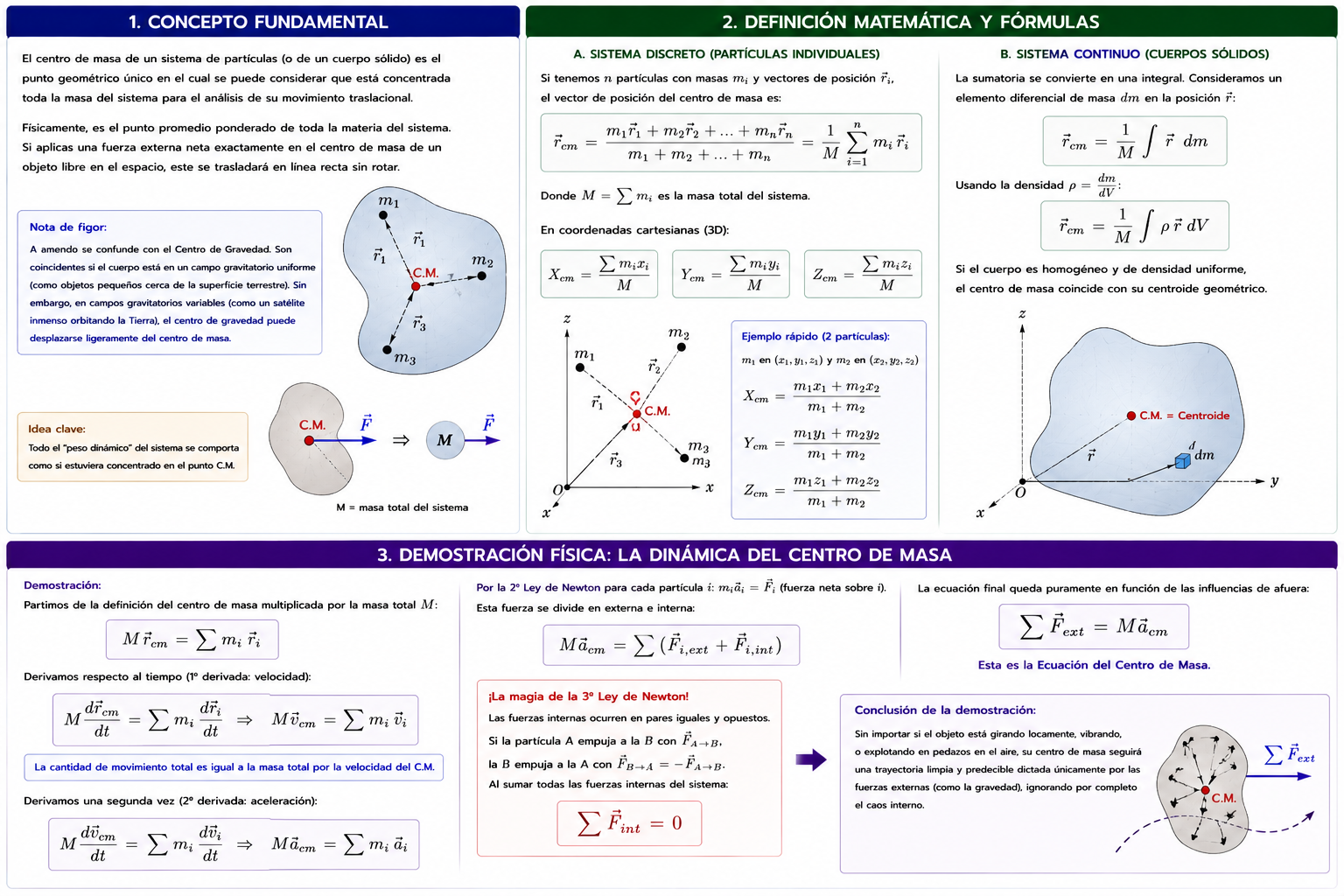
El centro de masa de un sistema de partículas (o de un cuerpo sólido) es el punto geométrico único en el cual se puede considerar que está concentrada toda la masa del sistema para el análisis de su movimiento traslacional.
Físicamente, es el punto promedio ponderado de toda la materia del sistema. Si aplicas una fuerza externa neta exactamente en el centro de masa de un objeto libre en el espacio, este se trasladará en línea recta sin rotar.
Nota de rigor: A menudo se confunde con el Centro de Gravedad. Son coincidentes si el cuerpo está en un campo gravitatorio uniforme (como objetos pequeños cerca de la superficie terrestre). Sin embargo, en campos gravitatorios variables (como un satélite inmenso orbitando la Tierra), el centro de gravedad puede desplazarse ligeramente del centro de masa.
2. Definición Matemática y Fórmulas
Para encontrar el centro de masa, debemos "promediar" las posiciones de todas las partes del sistema, dándole más peso (importancia) a las partes que tienen más masa.
A. Sistema Discreto (Partículas Individuales)
Si tenemos un sistema formado por $n$ partículas separadas, cada una con masa $m_i$ y vector de posición $\vec{r}_i$, el vector de posición del centro de masa $\vec{r}_{cm}$ se define como:
$$ \vec{r}_{cm} = \frac{m_1\vec{r}_1 + m_2\vec{r}_2 + \dots + m_n\vec{r}_n}{m_1 + m_2 + \dots + m_n} = \frac{1}{M} \sum_{i=1}^{n} m_i \vec{r}_i $$
Donde $M$ es la masa total del sistema ($M = \sum m_i$).
En un sistema de coordenadas cartesianas (3D), esta ecuación vectorial se descompone en tres fórmulas escalares muy sencillas:
- $X_{cm} = \frac{\sum m_i x_i}{M}$
- $Y_{cm} = \frac{\sum m_i y_i}{M}$
- $Z_{cm} = \frac{\sum m_i z_i}{M}$
B. Sistema Continuo (Cuerpos Sólidos)
Un bloque de metal no son partículas separadas, sino una distribución continua de materia. En este caso, la sumatoria se convierte en una integral. Consideramos un elemento diferencial de masa $dm$ en la posición $\vec{r}$:
$$ \vec{r}_{cm} = \frac{1}{M} \int \vec{r} \, dm $$
Para resolver esto en ingeniería, se suele utilizar la densidad ($\rho = \frac{dm}{dV}$), transformando la ecuación en una integral de volumen:
$$ \vec{r}_{cm} = \frac{1}{M} \int \rho \vec{r} \, dV $$
(Si el cuerpo es homogéneo y de densidad uniforme, el centro de masa coincide exactamente con su centroide geométrico).
3. Demostración Física: La Dinámica del Centro de Masa
¿Por qué los físicos e ingenieros inventaron este punto imaginario? La respuesta radica en la Segunda Ley de Newton. Vamos a demostrar que el centro de masa se mueve exactamente como si toda la masa y todas las fuerzas externas estuvieran aplicadas allí.
Demostración:
Partimos de la definición del centro de masa multiplicada por la masa total $M$:
$$ M \vec{r}_{cm} = \sum m_i \vec{r}_i $$
Si derivamos esta ecuación con respecto al tiempo, obtenemos la velocidad:
$$ M \frac{d\vec{r}_{cm}}{dt} = \sum m_i \frac{d\vec{r}_i}{dt} \implies M \vec{v}_{cm} = \sum m_i \vec{v}_i $$
(Esto demuestra que la cantidad de movimiento total del sistema es igual a la masa total por la velocidad del C.M.).
Derivamos una segunda vez con respecto al tiempo para obtener la aceleración:
$$ M \frac{d\vec{v}_{cm}}{dt} = \sum m_i \frac{d\vec{v}_i}{dt} \implies M \vec{a}_{cm} = \sum m_i \vec{a}_i $$
Por la Segunda Ley de Newton, sabemos que para cada partícula $i$, el término $m_i \vec{a}_i$ es igual a la fuerza neta sobre esa partícula ($\vec{F}_i$). Esta fuerza neta se divide en fuerzas externas y fuerzas internas (las que ejercen otras partículas del mismo sistema):
$$ M \vec{a}_{cm} = \sum (\vec{F}_{i, ext} + \vec{F}_{i, int}) $$
Aquí entra la magia de la Tercera Ley de Newton (Acción y Reacción). Todas las fuerzas internas ocurren en pares iguales y opuestos. Si la partícula A empuja a la B, la B empuja a la A con la misma fuerza. Por lo tanto, al sumar todas las fuerzas internas del sistema, estas se anulan matemáticamente a cero ($\sum \vec{F}_{int} = 0$).
La ecuación final queda puramente en función de las influencias de afuera:
$$ \sum \vec{F}_{ext} = M \vec{a}_{cm} $$
Conclusión de la demostración:
Sin importar si el objeto está girando locamente, vibrando, o explotando en pedazos en el aire, su centro de masa seguirá una trayectoria limpia y predecible dictada únicamente por las fuerzas externas (como la gravedad), ignorando por completo el caos interno.

Nota Adicional: Simplificación a Centroides y Primeros Momentos
1. Particularización a Sistemas Bidimensionales:
Las expresiones obtenidas para el Centro de Masa (C.M.) se pueden particularizar fácilmente para analizar sistemas continuos en el plano bidimensional. Físicamente, esto aplica al estudio de elementos como placas planas (donde el espesor es constante y despreciable) o alambres (donde la sección transversal es constante).
2. Densidad Homogénea y el Concepto de Centroide:
Si se trata de sistemas continuos donde el material tiene una densidad homogénea (uniforme en todo el cuerpo), la densidad se vuelve una constante matemática que se cancela de la ecuación. En este caso, el concepto físico de "Centro de Masa" se simplifica a un concepto puramente geométrico: el centroide.
A las integrales que definen esta posición se les conoce formalmente como el primer momento. Dependiendo de la dimensión del objeto, se dividen en primer momento de línea, área o volumen, evaluados respecto al eje o plano correspondiente:
A. Centroides de Líneas (Alambres finos)
El momento estático de la línea se iguala al producto de la longitud total ($L$) por la coordenada de su centroide ($\bar{x}$, $\bar{y}$):
- Primer momento de línea respecto al eje $Y$:
- $$ \bar{x} L = \int x \, dL $$
- Primer momento de línea respecto al eje $X$:
- $$ \bar{y} L = \int y \, dL $$
B. Centroides de Áreas (Placas planas delgadas)
El momento estático del área se iguala al producto del área total ($A$) por la coordenada de su centroide ($\bar{x}$, $\bar{y}$):
- Primer momento de área respecto al eje $Y$:
- $$ \bar{x} A = \int x \, dA $$
- Primer momento de área respecto al eje $X$:
- $$ \bar{y} A = \int y \, dA $$
C. Centroides de Volúmenes (Cuerpos sólidos 3D)
El momento estático del volumen se iguala al producto del volumen total ($V$) por la coordenada de su centroide espacial ($\bar{x}$, $\bar{y}$, $\bar{z}$):
- Primer momento de volumen respecto al plano $Y-Z$:
- $$ \bar{x} V = \int x \, dV $$
- Primer momento de volumen respecto al plano $X-Z$:
- $$ \bar{y} V = \int y \, dV $$
- Primer momento de volumen respecto al plano $X-Y$:
- $$ \bar{z} V = \int z \, dV $$
Importancia en Ingeniería:
El concepto del "Primer Momento de Área" ($\int y \, dA$) denotado frecuentemente con la letra $Q$, es crítico más adelante en la Resistencia de Materiales, ya que es la variable principal en la fórmula del esfuerzo cortante ($\tau = \frac{V \cdot Q}{I \cdot t}$) para el diseño de vigas estructurales.
